Mask R-CNN - Inspect Trained Model#
Code and visualizations to test, debug, and evaluate the Mask R-CNN model.
import os
import sys
import random
import math
import re
import time
import numpy as np
import tensorflow as tf
import matplotlib
import matplotlib.pyplot as plt
import matplotlib.patches as patches
# Root directory of the project
ROOT_DIR = os.path.abspath("../../")
# Import Mask RCNN
sys.path.append(ROOT_DIR) # To find local version of the library
from mrcnn import utils
from mrcnn import visualize
from mrcnn.visualize import display_images
import mrcnn.model as modellib
from mrcnn.model import log
%matplotlib inline
# Directory to save logs and trained model
MODEL_DIR = os.path.join(ROOT_DIR, "logs")
# Local path to trained weights file
COCO_MODEL_PATH = os.path.join(ROOT_DIR, "mask_rcnn_coco.h5")
# Download COCO trained weights from Releases if needed
if not os.path.exists(COCO_MODEL_PATH):
utils.download_trained_weights(COCO_MODEL_PATH)
# Path to Shapes trained weights
SHAPES_MODEL_PATH = os.path.join(ROOT_DIR, "mask_rcnn_shapes.h5")
Using TensorFlow backend.
Configurations#
# Run one of the code blocks
# Shapes toy dataset
# import shapes
# config = shapes.ShapesConfig()
# MS COCO Dataset
import coco
config = coco.CocoConfig()
COCO_DIR = "path to COCO dataset" # TODO: enter value here
# Override the training configurations with a few
# changes for inferencing.
class InferenceConfig(config.__class__):
# Run detection on one image at a time
GPU_COUNT = 1
IMAGES_PER_GPU = 1
config = InferenceConfig()
config.display()
Configurations:
BACKBONE_SHAPES [[256 256]
[128 128]
[ 64 64]
[ 32 32]
[ 16 16]]
BACKBONE_STRIDES [4, 8, 16, 32, 64]
BATCH_SIZE 1
BBOX_STD_DEV [ 0.1 0.1 0.2 0.2]
DETECTION_MAX_INSTANCES 100
DETECTION_MIN_CONFIDENCE 0.5
DETECTION_NMS_THRESHOLD 0.3
GPU_COUNT 1
IMAGES_PER_GPU 1
IMAGE_MAX_DIM 1024
IMAGE_MIN_DIM 800
IMAGE_PADDING True
IMAGE_SHAPE [1024 1024 3]
LEARNING_MOMENTUM 0.9
LEARNING_RATE 0.002
MASK_POOL_SIZE 14
MASK_SHAPE [28, 28]
MAX_GT_INSTANCES 100
MEAN_PIXEL [ 123.7 116.8 103.9]
MINI_MASK_SHAPE (56, 56)
NAME coco
NUM_CLASSES 81
POOL_SIZE 7
POST_NMS_ROIS_INFERENCE 1000
POST_NMS_ROIS_TRAINING 2000
ROI_POSITIVE_RATIO 0.33
RPN_ANCHOR_RATIOS [0.5, 1, 2]
RPN_ANCHOR_SCALES (32, 64, 128, 256, 512)
RPN_ANCHOR_STRIDE 2
RPN_BBOX_STD_DEV [ 0.1 0.1 0.2 0.2]
RPN_TRAIN_ANCHORS_PER_IMAGE 256
STEPS_PER_EPOCH 1000
TRAIN_ROIS_PER_IMAGE 128
USE_MINI_MASK True
USE_RPN_ROIS True
VALIDATION_STEPS 50
WEIGHT_DECAY 0.0001
Notebook Preferences#
# Device to load the neural network on.
# Useful if you're training a model on the same
# machine, in which case use CPU and leave the
# GPU for training.
DEVICE = "/cpu:0" # /cpu:0 or /gpu:0
# Inspect the model in training or inference modes
# values: 'inference' or 'training'
# TODO: code for 'training' test mode not ready yet
TEST_MODE = "inference"
def get_ax(rows=1, cols=1, size=16):
"""Return a Matplotlib Axes array to be used in
all visualizations in the notebook. Provide a
central point to control graph sizes.
Adjust the size attribute to control how big to render images
"""
_, ax = plt.subplots(rows, cols, figsize=(size*cols, size*rows))
return ax
Load Validation Dataset#
# Build validation dataset
if config.NAME == 'shapes':
dataset = shapes.ShapesDataset()
dataset.load_shapes(500, config.IMAGE_SHAPE[0], config.IMAGE_SHAPE[1])
elif config.NAME == "coco":
dataset = coco.CocoDataset()
dataset.load_coco(COCO_DIR, "minival")
# Must call before using the dataset
dataset.prepare()
print("Images: {}\nClasses: {}".format(len(dataset.image_ids), dataset.class_names))
loading annotations into memory...
Done (t=4.86s)
creating index...
index created!
Images: 35185
Classes: ['BG', 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light', 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow', 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee', 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard', 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple', 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch', 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone', 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear', 'hair drier', 'toothbrush']
Load Model#
# Create model in inference mode
with tf.device(DEVICE):
model = modellib.MaskRCNN(mode="inference", model_dir=MODEL_DIR,
config=config)
# Set weights file path
if config.NAME == "shapes":
weights_path = SHAPES_MODEL_PATH
elif config.NAME == "coco":
weights_path = COCO_MODEL_PATH
# Or, uncomment to load the last model you trained
# weights_path = model.find_last()
# Load weights
print("Loading weights ", weights_path)
model.load_weights(weights_path, by_name=True)
Run Detection#
image_id = random.choice(dataset.image_ids)
image, image_meta, gt_class_id, gt_bbox, gt_mask =\
modellib.load_image_gt(dataset, config, image_id, use_mini_mask=False)
info = dataset.image_info[image_id]
print("image ID: {}.{} ({}) {}".format(info["source"], info["id"], image_id,
dataset.image_reference(image_id)))
# Run object detection
results = model.detect([image], verbose=1)
# Display results
ax = get_ax(1)
r = results[0]
visualize.display_instances(image, r['rois'], r['masks'], r['class_ids'],
dataset.class_names, r['scores'], ax=ax,
title="Predictions")
log("gt_class_id", gt_class_id)
log("gt_bbox", gt_bbox)
log("gt_mask", gt_mask)
image ID: coco.392144 (34940) http://cocodataset.org/#explore?id=392144
Processing 1 images
image shape: (1024, 1024, 3) min: 0.00000 max: 255.00000
molded_images shape: (1, 1024, 1024, 3) min: -123.70000 max: 151.10000
image_metas shape: (1, 89) min: 0.00000 max: 1024.00000
gt_class_id shape: (10,) min: 1.00000 max: 40.00000
gt_bbox shape: (10, 5) min: 0.00000 max: 1024.00000
gt_mask shape: (1024, 1024, 10) min: 0.00000 max: 1.00000

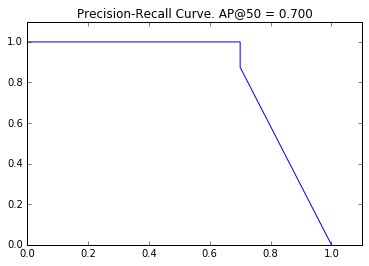
Precision-Recall#
# Draw precision-recall curve
AP, precisions, recalls, overlaps = utils.compute_ap(gt_bbox, gt_class_id, gt_mask,
r['rois'], r['class_ids'], r['scores'], r['masks'])
visualize.plot_precision_recall(AP, precisions, recalls)
# Grid of ground truth objects and their predictions
visualize.plot_overlaps(gt_class_id, r['class_ids'], r['scores'],
overlaps, dataset.class_names)

Compute mAP @ IoU=50 on Batch of Images#
# Compute VOC-style Average Precision
def compute_batch_ap(image_ids):
APs = []
for image_id in image_ids:
# Load image
image, image_meta, gt_class_id, gt_bbox, gt_mask =\
modellib.load_image_gt(dataset, config,
image_id, use_mini_mask=False)
# Run object detection
results = model.detect([image], verbose=0)
# Compute AP
r = results[0]
AP, precisions, recalls, overlaps =\
utils.compute_ap(gt_bbox, gt_class_id, gt_mask,
r['rois'], r['class_ids'], r['scores'], r['masks'])
APs.append(AP)
return APs
# Pick a set of random images
image_ids = np.random.choice(dataset.image_ids, 10)
APs = compute_batch_ap(image_ids)
print("mAP @ IoU=50: ", np.mean(APs))
mAP @ IoU=50: 0.656323084916
/usr/local/lib/python3.5/dist-packages/scipy/ndimage/interpolation.py:600: UserWarning: From scipy 0.13.0, the output shape of zoom() is calculated with round() instead of int() - for these inputs the size of the returned array has changed.
"the returned array has changed.", UserWarning)
Step by Step Prediction#
Stage 1: Region Proposal Network#
The Region Proposal Network (RPN) runs a lightweight binary classifier on a lot of boxes (anchors) over the image and returns object/no-object scores. Anchors with high objectness score (positive anchors) are passed to the stage two to be classified.
Often, even positive anchors don’t cover objects fully. So the RPN also regresses a refinement (a delta in location and size) to be applied to the anchors to shift it and resize it a bit to the correct boundaries of the object.
1.a RPN Targets#
The RPN targets are the training values for the RPN. To generate the targets, we start with a grid of anchors that cover the full image at different scales, and then we compute the IoU of the anchors with ground truth object. Positive anchors are those that have an IoU >= 0.7 with any ground truth object, and negative anchors are those that don’t cover any object by more than 0.3 IoU. Anchors in between (i.e. cover an object by IoU >= 0.3 but < 0.7) are considered neutral and excluded from training.
To train the RPN regressor, we also compute the shift and resizing needed to make the anchor cover the ground truth object completely.
# Generate RPN trainig targets
# target_rpn_match is 1 for positive anchors, -1 for negative anchors
# and 0 for neutral anchors.
target_rpn_match, target_rpn_bbox = modellib.build_rpn_targets(
image.shape, model.anchors, gt_class_id, gt_bbox, model.config)
log("target_rpn_match", target_rpn_match)
log("target_rpn_bbox", target_rpn_bbox)
positive_anchor_ix = np.where(target_rpn_match[:] == 1)[0]
negative_anchor_ix = np.where(target_rpn_match[:] == -1)[0]
neutral_anchor_ix = np.where(target_rpn_match[:] == 0)[0]
positive_anchors = model.anchors[positive_anchor_ix]
negative_anchors = model.anchors[negative_anchor_ix]
neutral_anchors = model.anchors[neutral_anchor_ix]
log("positive_anchors", positive_anchors)
log("negative_anchors", negative_anchors)
log("neutral anchors", neutral_anchors)
# Apply refinement deltas to positive anchors
refined_anchors = utils.apply_box_deltas(
positive_anchors,
target_rpn_bbox[:positive_anchors.shape[0]] * model.config.RPN_BBOX_STD_DEV)
log("refined_anchors", refined_anchors, )
target_rpn_match shape: (65472,) min: -1.00000 max: 1.00000
target_rpn_bbox shape: (256, 4) min: -5.19860 max: 2.59641
positive_anchors shape: (14, 4) min: 5.49033 max: 973.25483
negative_anchors shape: (242, 4) min: -22.62742 max: 1038.62742
neutral anchors shape: (65216, 4) min: -362.03867 max: 1258.03867
refined_anchors shape: (14, 4) min: 0.00000 max: 1023.99994
# Display positive anchors before refinement (dotted) and
# after refinement (solid).
visualize.draw_boxes(image, boxes=positive_anchors, refined_boxes=refined_anchors, ax=get_ax())
1.b RPN Predictions#
Here we run the RPN graph and display its predictions.
# Run RPN sub-graph
pillar = model.keras_model.get_layer("ROI").output # node to start searching from
# TF 1.4 and 1.9 introduce new versions of NMS. Search for all names to support TF 1.3~1.10
nms_node = model.ancestor(pillar, "ROI/rpn_non_max_suppression:0")
if nms_node is None:
nms_node = model.ancestor(pillar, "ROI/rpn_non_max_suppression/NonMaxSuppressionV2:0")
if nms_node is None: #TF 1.9-1.10
nms_node = model.ancestor(pillar, "ROI/rpn_non_max_suppression/NonMaxSuppressionV3:0")
rpn = model.run_graph([image], [
("rpn_class", model.keras_model.get_layer("rpn_class").output),
("pre_nms_anchors", model.ancestor(pillar, "ROI/pre_nms_anchors:0")),
("refined_anchors", model.ancestor(pillar, "ROI/refined_anchors:0")),
("refined_anchors_clipped", model.ancestor(pillar, "ROI/refined_anchors_clipped:0")),
("post_nms_anchor_ix", nms_node),
("proposals", model.keras_model.get_layer("ROI").output),
])
rpn_class shape: (1, 65472, 2) min: 0.00000 max: 1.00000
pre_nms_anchors shape: (1, 10000, 4) min: -362.03867 max: 1258.03870
refined_anchors shape: (1, 10000, 4) min: -1385.67920 max: 2212.44043
refined_anchors_clipped shape: (1, 10000, 4) min: 0.00000 max: 1024.00000
post_nms_anchor_ix shape: (1000,) min: 0.00000 max: 1477.00000
proposals shape: (1, 1000, 4) min: 0.00000 max: 1.00000
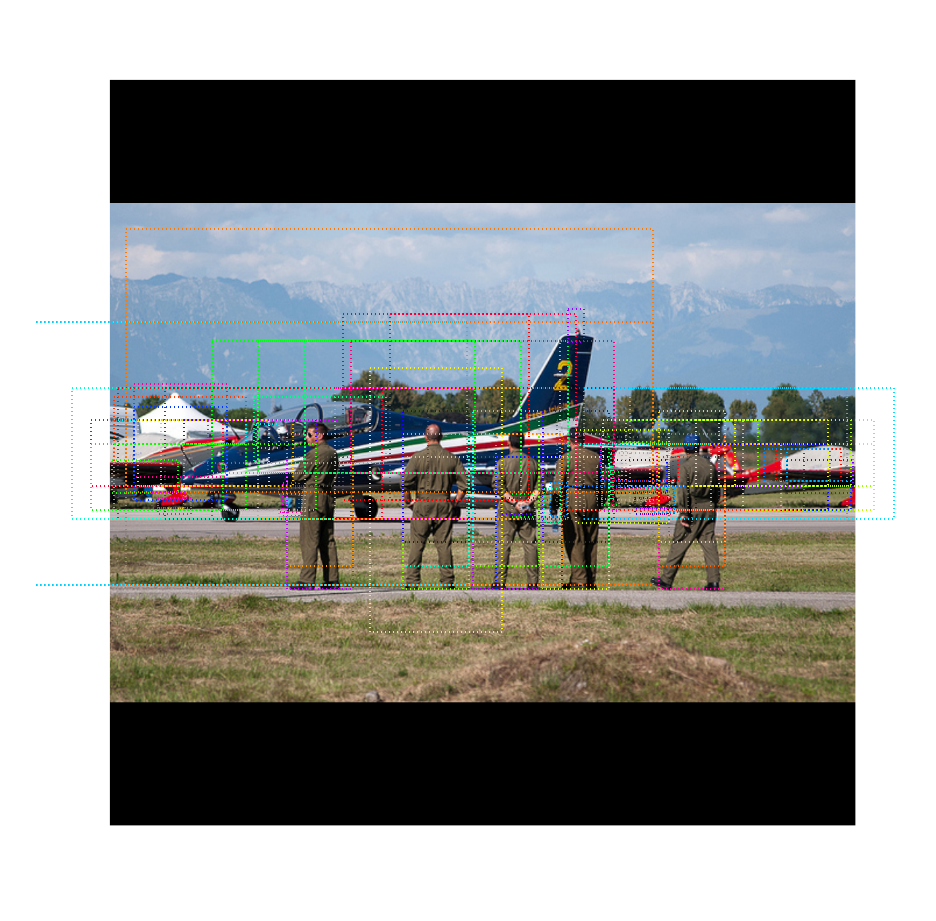
# Show top anchors by score (before refinement)
limit = 100
sorted_anchor_ids = np.argsort(rpn['rpn_class'][:,:,1].flatten())[::-1]
visualize.draw_boxes(image, boxes=model.anchors[sorted_anchor_ids[:limit]], ax=get_ax())
# Show top anchors with refinement. Then with clipping to image boundaries
limit = 50
ax = get_ax(1, 2)
pre_nms_anchors = utils.denorm_boxes(rpn["pre_nms_anchors"][0], image.shape[:2])
refined_anchors = utils.denorm_boxes(rpn["refined_anchors"][0], image.shape[:2])
refined_anchors_clipped = utils.denorm_boxes(rpn["refined_anchors_clipped"][0], image.shape[:2])
visualize.draw_boxes(image, boxes=pre_nms_anchors[:limit],
refined_boxes=refined_anchors[:limit], ax=ax[0])
visualize.draw_boxes(image, refined_boxes=refined_anchors_clipped[:limit], ax=ax[1])

# Show refined anchors after non-max suppression
limit = 50
ixs = rpn["post_nms_anchor_ix"][:limit]
visualize.draw_boxes(image, refined_boxes=refined_anchors_clipped[ixs], ax=get_ax())
# Show final proposals
# These are the same as the previous step (refined anchors
# after NMS) but with coordinates normalized to [0, 1] range.
limit = 50
# Convert back to image coordinates for display
h, w = config.IMAGE_SHAPE[:2]
proposals = rpn['proposals'][0, :limit] * np.array([h, w, h, w])
visualize.draw_boxes(image, refined_boxes=proposals, ax=get_ax())
# Measure the RPN recall (percent of objects covered by anchors)
# Here we measure recall for 3 different methods:
# - All anchors
# - All refined anchors
# - Refined anchors after NMS
iou_threshold = 0.7
recall, positive_anchor_ids = utils.compute_recall(model.anchors, gt_bbox, iou_threshold)
print("All Anchors ({:5}) Recall: {:.3f} Positive anchors: {}".format(
model.anchors.shape[0], recall, len(positive_anchor_ids)))
recall, positive_anchor_ids = utils.compute_recall(rpn['refined_anchors'][0], gt_bbox, iou_threshold)
print("Refined Anchors ({:5}) Recall: {:.3f} Positive anchors: {}".format(
rpn['refined_anchors'].shape[1], recall, len(positive_anchor_ids)))
recall, positive_anchor_ids = utils.compute_recall(proposals, gt_bbox, iou_threshold)
print("Post NMS Anchors ({:5}) Recall: {:.3f} Positive anchors: {}".format(
proposals.shape[0], recall, len(positive_anchor_ids)))
All Anchors (65472) Recall: 0.400 Positive anchors: 8
Refined Anchors (10000) Recall: 0.900 Positive anchors: 65
Post NMS Anchors ( 50) Recall: 0.800 Positive anchors: 9
Stage 2: Proposal Classification#
This stage takes the region proposals from the RPN and classifies them.
2.a Proposal Classification#
Run the classifier heads on proposals to generate class propbabilities and bounding box regressions.
# Get input and output to classifier and mask heads.
mrcnn = model.run_graph([image], [
("proposals", model.keras_model.get_layer("ROI").output),
("probs", model.keras_model.get_layer("mrcnn_class").output),
("deltas", model.keras_model.get_layer("mrcnn_bbox").output),
("masks", model.keras_model.get_layer("mrcnn_mask").output),
("detections", model.keras_model.get_layer("mrcnn_detection").output),
])
proposals shape: (1, 1000, 4) min: 0.00000 max: 1.00000
probs shape: (1, 1000, 81) min: 0.00000 max: 0.99999
deltas shape: (1, 1000, 81, 4) min: -3.26400 max: 3.83929
masks shape: (1, 100, 28, 28, 81) min: 0.00000 max: 0.99984
detections shape: (1, 100, 6) min: 0.00000 max: 844.00000
# Get detection class IDs. Trim zero padding.
det_class_ids = mrcnn['detections'][0, :, 4].astype(np.int32)
det_count = np.where(det_class_ids == 0)[0][0]
det_class_ids = det_class_ids[:det_count]
detections = mrcnn['detections'][0, :det_count]
print("{} detections: {}".format(
det_count, np.array(dataset.class_names)[det_class_ids]))
captions = ["{} {:.3f}".format(dataset.class_names[int(c)], s) if c > 0 else ""
for c, s in zip(detections[:, 4], detections[:, 5])]
visualize.draw_boxes(
image,
refined_boxes=utils.denorm_boxes(detections[:, :4], image.shape[:2]),
visibilities=[2] * len(detections),
captions=captions, title="Detections",
ax=get_ax())
8 detections: ['person' 'person' 'person' 'person' 'person' 'airplane' 'airplane' 'car']

2.c Step by Step Detection#
Here we dive deeper into the process of processing the detections.
# Proposals are in normalized coordinates. Scale them
# to image coordinates.
h, w = config.IMAGE_SHAPE[:2]
proposals = np.around(mrcnn["proposals"][0] * np.array([h, w, h, w])).astype(np.int32)
# Class ID, score, and mask per proposal
roi_class_ids = np.argmax(mrcnn["probs"][0], axis=1)
roi_scores = mrcnn["probs"][0, np.arange(roi_class_ids.shape[0]), roi_class_ids]
roi_class_names = np.array(dataset.class_names)[roi_class_ids]
roi_positive_ixs = np.where(roi_class_ids > 0)[0]
# How many ROIs vs empty rows?
print("{} Valid proposals out of {}".format(np.sum(np.any(proposals, axis=1)), proposals.shape[0]))
print("{} Positive ROIs".format(len(roi_positive_ixs)))
# Class counts
print(list(zip(*np.unique(roi_class_names, return_counts=True))))
1000 Valid proposals out of 1000
71 Positive ROIs
[('BG', 929), ('airplane', 23), ('car', 11), ('person', 37)]
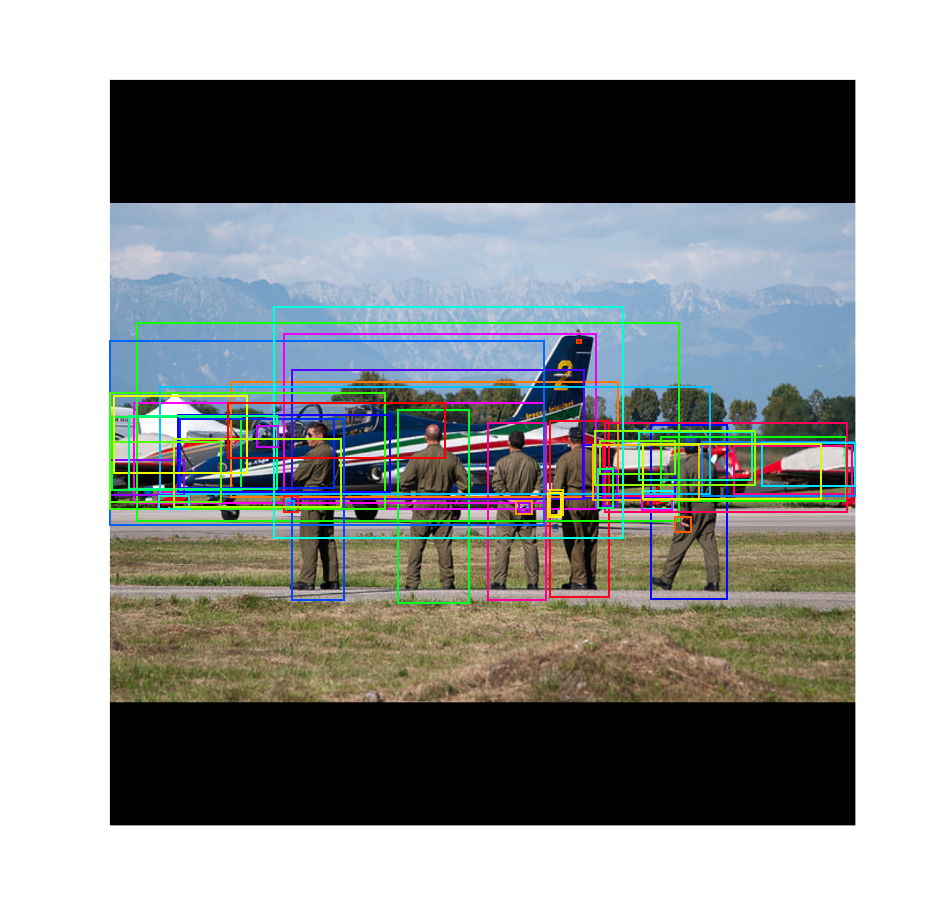
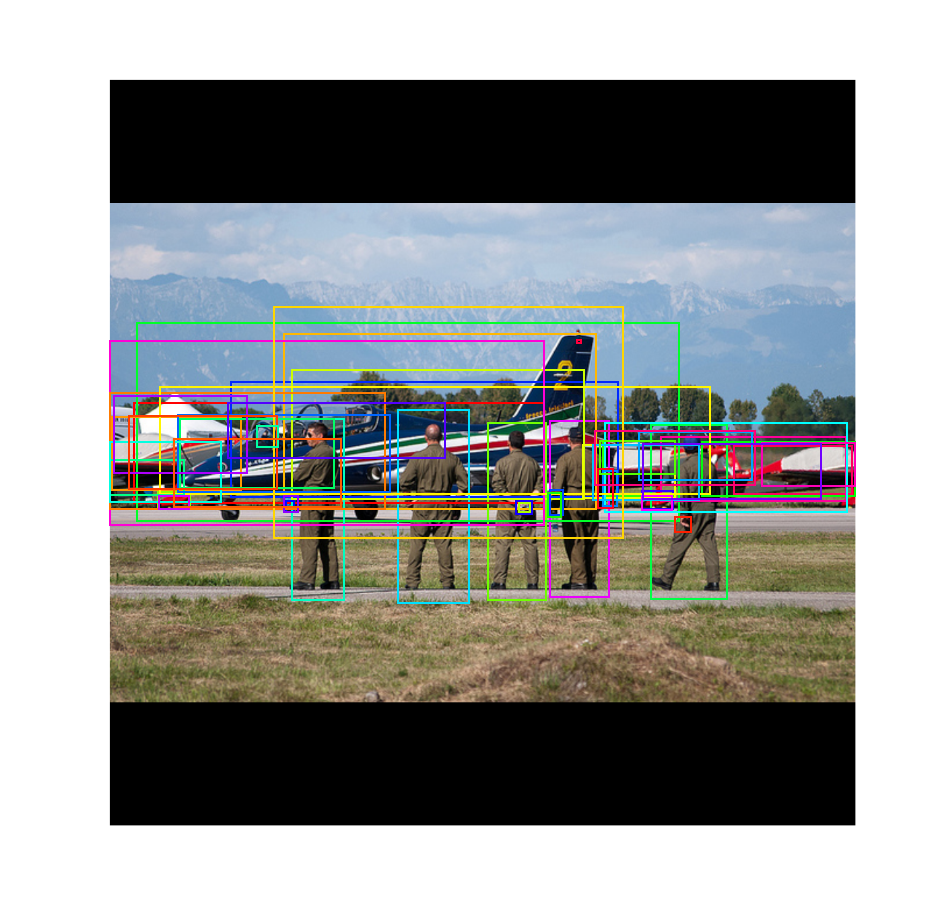
# Display a random sample of proposals.
# Proposals classified as background are dotted, and
# the rest show their class and confidence score.
limit = 200
ixs = np.random.randint(0, proposals.shape[0], limit)
captions = ["{} {:.3f}".format(dataset.class_names[c], s) if c > 0 else ""
for c, s in zip(roi_class_ids[ixs], roi_scores[ixs])]
visualize.draw_boxes(image, boxes=proposals[ixs],
visibilities=np.where(roi_class_ids[ixs] > 0, 2, 1),
captions=captions, title="ROIs Before Refinement",
ax=get_ax())

Apply Bounding Box Refinement#
# Class-specific bounding box shifts.
roi_bbox_specific = mrcnn["deltas"][0, np.arange(proposals.shape[0]), roi_class_ids]
log("roi_bbox_specific", roi_bbox_specific)
# Apply bounding box transformations
# Shape: [N, (y1, x1, y2, x2)]
refined_proposals = utils.apply_box_deltas(
proposals, roi_bbox_specific * config.BBOX_STD_DEV).astype(np.int32)
log("refined_proposals", refined_proposals)
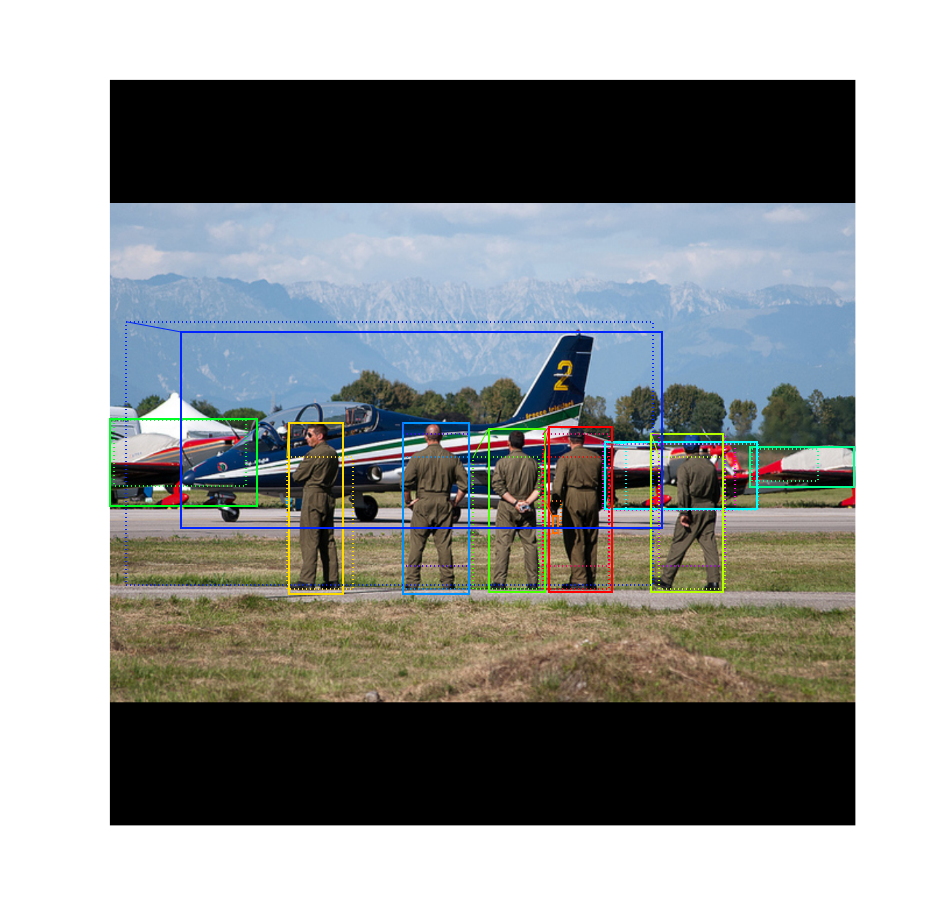
# Show positive proposals
# ids = np.arange(roi_boxes.shape[0]) # Display all
limit = 5
ids = np.random.randint(0, len(roi_positive_ixs), limit) # Display random sample
captions = ["{} {:.3f}".format(dataset.class_names[c], s) if c > 0 else ""
for c, s in zip(roi_class_ids[roi_positive_ixs][ids], roi_scores[roi_positive_ixs][ids])]
visualize.draw_boxes(image, boxes=proposals[roi_positive_ixs][ids],
refined_boxes=refined_proposals[roi_positive_ixs][ids],
visibilities=np.where(roi_class_ids[roi_positive_ixs][ids] > 0, 1, 0),
captions=captions, title="ROIs After Refinement",
ax=get_ax())
roi_bbox_specific shape: (1000, 4) min: -2.44748 max: 2.94838
refined_proposals shape: (1000, 4) min: -8.00000 max: 1028.00000

Filter Low Confidence Detections#
# Remove boxes classified as background
keep = np.where(roi_class_ids > 0)[0]
print("Keep {} detections:\n{}".format(keep.shape[0], keep))
Keep 71 detections:
[ 0 2 3 4 5 6 8 9 16 17 18 19 25 30 36 37 38 40
42 50 51 67 68 74 78 79 92 158 162 177 187 191 209 225 261 284
292 314 328 374 402 403 409 429 473 490 499 516 545 557 572 575 607 624
638 639 671 703 719 744 753 754 778 790 813 815 848 862 865 876 911]
# Remove low confidence detections
keep = np.intersect1d(keep, np.where(roi_scores >= config.DETECTION_MIN_CONFIDENCE)[0])
print("Remove boxes below {} confidence. Keep {}:\n{}".format(
config.DETECTION_MIN_CONFIDENCE, keep.shape[0], keep))
Remove boxes below 0.5 confidence. Keep 67:
[ 0 2 4 5 6 8 9 16 17 18 19 25 30 36 37 38 40 42
50 51 67 68 74 78 79 158 162 177 187 191 209 225 284 292 314 328
374 402 403 409 429 473 490 499 516 545 557 575 607 624 638 639 671 703
719 744 753 754 778 790 813 815 848 862 865 876 911]
Per-Class Non-Max Suppression#
# Apply per-class non-max suppression
pre_nms_boxes = refined_proposals[keep]
pre_nms_scores = roi_scores[keep]
pre_nms_class_ids = roi_class_ids[keep]
nms_keep = []
for class_id in np.unique(pre_nms_class_ids):
# Pick detections of this class
ixs = np.where(pre_nms_class_ids == class_id)[0]
# Apply NMS
class_keep = utils.non_max_suppression(pre_nms_boxes[ixs],
pre_nms_scores[ixs],
config.DETECTION_NMS_THRESHOLD)
# Map indicies
class_keep = keep[ixs[class_keep]]
nms_keep = np.union1d(nms_keep, class_keep)
print("{:22}: {} -> {}".format(dataset.class_names[class_id][:20],
keep[ixs], class_keep))
keep = np.intersect1d(keep, nms_keep).astype(np.int32)
print("\nKept after per-class NMS: {}\n{}".format(keep.shape[0], keep))
person : [ 0 2 5 6 9 67 68 74 79 158 162 187 191 225 284 374 403 409
429 490 545 557 575 607 638 671 703 744 753 754 778 790 813 848 862 876
911] -> [ 0 162 9 2 671]
car : [ 16 18 30 36 51 177 314 328 499 624 815] -> [30]
airplane : [ 4 8 17 19 25 37 38 40 42 50 78 209 292 402 473 516 639 719
865] -> [78 19]
Kept after per-class NMS: 8
[ 0 2 9 19 30 78 162 671]
# Show final detections
ixs = np.arange(len(keep)) # Display all
# ixs = np.random.randint(0, len(keep), 10) # Display random sample
captions = ["{} {:.3f}".format(dataset.class_names[c], s) if c > 0 else ""
for c, s in zip(roi_class_ids[keep][ixs], roi_scores[keep][ixs])]
visualize.draw_boxes(
image, boxes=proposals[keep][ixs],
refined_boxes=refined_proposals[keep][ixs],
visibilities=np.where(roi_class_ids[keep][ixs] > 0, 1, 0),
captions=captions, title="Detections after NMS",
ax=get_ax())

Stage 3: Generating Masks#
This stage takes the detections (refined bounding boxes and class IDs) from the previous layer and runs the mask head to generate segmentation masks for every instance.
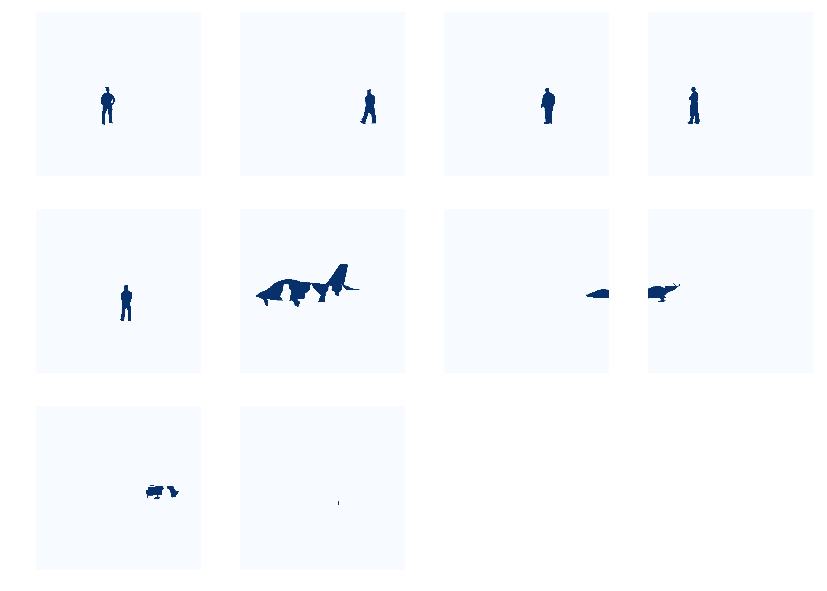
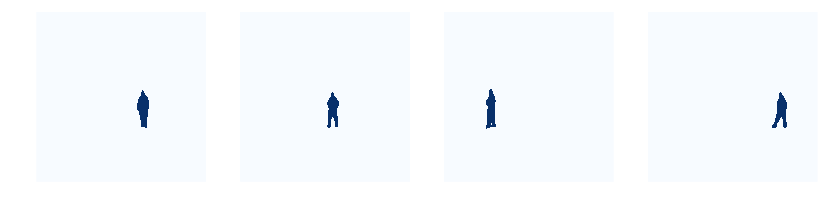
3.a Mask Targets#
These are the training targets for the mask branch
display_images(np.transpose(gt_mask, [2, 0, 1]), cmap="Blues")
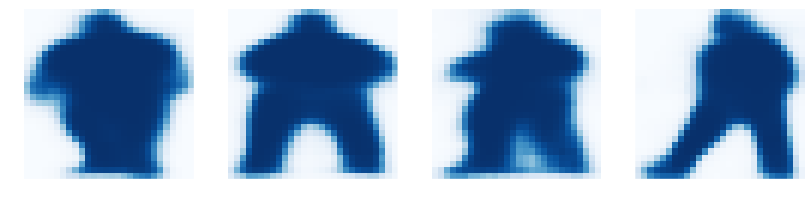
3.b Predicted Masks#
# Get predictions of mask head
mrcnn = model.run_graph([image], [
("detections", model.keras_model.get_layer("mrcnn_detection").output),
("masks", model.keras_model.get_layer("mrcnn_mask").output),
])
# Get detection class IDs. Trim zero padding.
det_class_ids = mrcnn['detections'][0, :, 4].astype(np.int32)
det_count = np.where(det_class_ids == 0)[0][0]
det_class_ids = det_class_ids[:det_count]
print("{} detections: {}".format(
det_count, np.array(dataset.class_names)[det_class_ids]))
detections shape: (1, 100, 6) min: 0.00000 max: 844.00000
masks shape: (1, 100, 28, 28, 81) min: 0.00000 max: 0.99984
8 detections: ['person' 'person' 'person' 'person' 'person' 'airplane' 'airplane' 'car']
# Masks
det_boxes = utils.denorm_boxes(mrcnn["detections"][0, :, :4], image.shape[:2])
det_mask_specific = np.array([mrcnn["masks"][0, i, :, :, c]
for i, c in enumerate(det_class_ids)])
det_masks = np.array([utils.unmold_mask(m, det_boxes[i], image.shape)
for i, m in enumerate(det_mask_specific)])
log("det_mask_specific", det_mask_specific)
log("det_masks", det_masks)
det_mask_specific shape: (8, 28, 28) min: 0.00001 max: 0.99984
det_masks shape: (8, 1024, 1024) min: 0.00000 max: 1.00000
display_images(det_mask_specific[:4] * 255, cmap="Blues", interpolation="none")
display_images(det_masks[:4] * 255, cmap="Blues", interpolation="none")
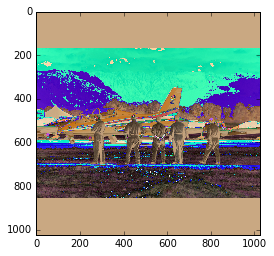
Visualize Activations#
In some cases it helps to look at the output from different layers and visualize them to catch issues and odd patterns.
# Get activations of a few sample layers
activations = model.run_graph([image], [
("input_image", tf.identity(model.keras_model.get_layer("input_image").output)),
("res4w_out", model.keras_model.get_layer("res4w_out").output), # for resnet100
("rpn_bbox", model.keras_model.get_layer("rpn_bbox").output),
("roi", model.keras_model.get_layer("ROI").output),
])
input_image shape: (1, 1024, 1024, 3) min: -123.70000 max: 151.10001
res4w_out shape: (1, 64, 64, 1024) min: 0.00000 max: 54.64681
rpn_bbox shape: (1, 65472, 4) min: -12.26412 max: 18.18265
roi shape: (1, 1000, 4) min: 0.00000 max: 1.00000
# Input image (normalized)
_ = plt.imshow(modellib.unmold_image(activations["input_image"][0],config))
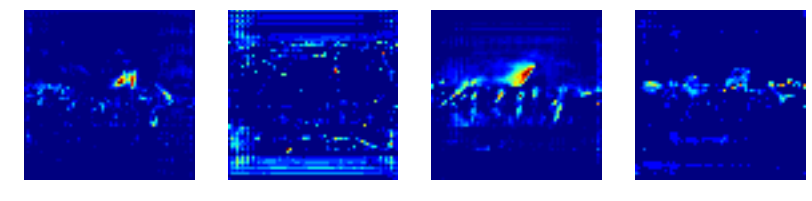
# Backbone feature map
display_images(np.transpose(activations["res4w_out"][0,:,:,:4], [2, 0, 1]))
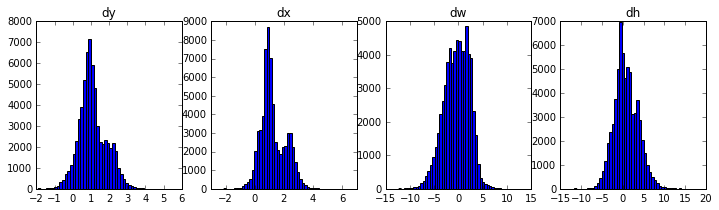
# Histograms of RPN bounding box deltas
plt.figure(figsize=(12, 3))
plt.subplot(1, 4, 1)
plt.title("dy")
_ = plt.hist(activations["rpn_bbox"][0,:,0], 50)
plt.subplot(1, 4, 2)
plt.title("dx")
_ = plt.hist(activations["rpn_bbox"][0,:,1], 50)
plt.subplot(1, 4, 3)
plt.title("dw")
_ = plt.hist(activations["rpn_bbox"][0,:,2], 50)
plt.subplot(1, 4, 4)
plt.title("dh")
_ = plt.hist(activations["rpn_bbox"][0,:,3], 50)
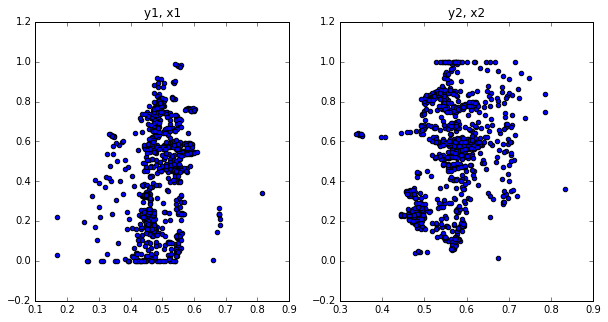
# Distribution of y, x coordinates of generated proposals
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title("y1, x1")
plt.scatter(activations["roi"][0,:,0], activations["roi"][0,:,1])
plt.subplot(1, 2, 2)
plt.title("y2, x2")
plt.scatter(activations["roi"][0,:,2], activations["roi"][0,:,3])
plt.show()