Engineering AI Agents
BOOK
Foundations
Training Deep Networks
Perception
Kinematics
State Estimation
Large Language Models
Multimodal Reasoning
Task Planning
Global Planning
Local Planning
Markov Decision Processes
Reinforcement Learning
VLA Agents
COURSES
Introduction to AI
AI for Robotics
Deep Learning for Computer Vision
DATA MINING - BEING PORTED
MEDIA
AI for Robotics
ABOUT ME
Kinematics
Kinematics
Connecting geometry and algebra for robots with egomotion.
Author
Pantelis Monogioudis
Kinematics
Configuration Space Topology
Configuration-space - study
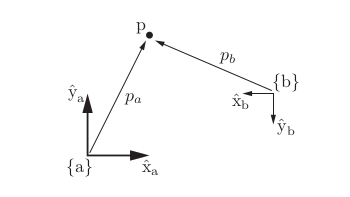
Rigid-body Motions
Rigid-body motions - study
Motion Representations Notebook
Wheeled robots - study
Wheeled Robot Models
Categories
All
(8)
Configuration Space Topology
A robot is mechanically constructed by connecting a set of bodies, called links,to each other using various types of joints.Actuators, such as electric motors,deliver forces…
Configuration-space - study
Your browser does not support PDFs. <a href="assets/pdf/lynch-config-space.pdf">Download the PDF</a>.
Rigid-body Motions
The general motion algebra introduced in robotics is implemented using a variety of motion representations, each suited to different modeling needs. Motion can be described…
Rigid-body motions - study
Your browser does not support PDFs. <a href="/assets/pdf/lynch-body-motions.pdf">Download the PDF</a>.
Wheeled robots - study
Your browser does not support PDFs. <a href="/assets/pdf/lynch-wheeled-robots.pdf">Download the PDF</a>.
No matching items