1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
|
"""Contains model definitions for versions of the Oxford VGG network.
These model definitions were introduced in the following technical report:
Very Deep Convolutional Networks For Large-Scale Image Recognition
Karen Simonyan and Andrew Zisserman
arXiv technical report, 2015
PDF: http://arxiv.org/pdf/1409.1556.pdf
ILSVRC 2014 Slides: http://www.robots.ox.ac.uk/~karen/pdf/ILSVRC_2014.pdf
CC-BY-4.0
More information can be obtained from the VGG website:
www.robots.ox.ac.uk/~vgg/research/very_deep/
Usage:
with slim.arg_scope(vgg.vgg_arg_scope()):
outputs, end_points = vgg.vgg_a(inputs)
with slim.arg_scope(vgg.vgg_arg_scope()):
outputs, end_points = vgg.vgg_16(inputs)
@@vgg_16
"""
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import tensorflow.compat.v1 as tf
import tf_slim as slim
def vgg_arg_scope(weight_decay=0.0005):
"""Defines the VGG arg scope.
Args:
weight_decay: The l2 regularization coefficient.
Returns:
An arg_scope.
"""
with slim.arg_scope([slim.conv2d, slim.fully_connected],
activation_fn=tf.nn.relu,
weights_regularizer=slim.l2_regularizer(weight_decay),
biases_initializer=tf.zeros_initializer()):
with slim.arg_scope([slim.conv2d], padding='SAME') as arg_sc:
return arg_sc
def vgg_16(inputs,
num_classes=1000,
is_training=True,
dropout_keep_prob=0.5,
spatial_squeeze=True,
reuse=None,
scope='vgg_16',
fc_conv_padding='VALID',
global_pool=False):
"""Oxford Net VGG 16-Layers version D Example.
Note: All the fully_connected layers have been transformed to conv2d layers.
To use in classification mode, resize input to 224x224.
Args:
inputs: a tensor of size [batch_size, height, width, channels].
num_classes: number of predicted classes. If 0 or None, the logits layer is
omitted and the input features to the logits layer are returned instead.
is_training: whether or not the model is being trained.
dropout_keep_prob: the probability that activations are kept in the dropout
layers during training.
spatial_squeeze: whether or not should squeeze the spatial dimensions of the
outputs. Useful to remove unnecessary dimensions for classification.
reuse: whether or not the network and its variables should be reused. To be
able to reuse 'scope' must be given.
scope: Optional scope for the variables.
fc_conv_padding: the type of padding to use for the fully connected layer
that is implemented as a convolutional layer. Use 'SAME' padding if you
are applying the network in a fully convolutional manner and want to
get a prediction map downsampled by a factor of 32 as an output.
Otherwise, the output prediction map will be (input / 32) - 6 in case of
'VALID' padding.
global_pool: Optional boolean flag. If True, the input to the classification
layer is avgpooled to size 1x1, for any input size. (This is not part
of the original VGG architecture.)
Returns:
net: the output of the logits layer (if num_classes is a non-zero integer),
or the input to the logits layer (if num_classes is 0 or None).
end_points: a dict of tensors with intermediate activations.
"""
with tf.variable_scope(
scope, 'vgg_16', [inputs], reuse=reuse) as sc:
end_points_collection = sc.original_name_scope + '_end_points'
# Collect outputs for conv2d, fully_connected and max_pool2d.
with slim.arg_scope([slim.conv2d, slim.fully_connected, slim.max_pool2d],
outputs_collections=end_points_collection):
net = slim.repeat(inputs, 2, slim.conv2d, 64, [3, 3], scope='conv1')
net = slim.max_pool2d(net, [2, 2], scope='pool1')
net = slim.repeat(net, 2, slim.conv2d, 128, [3, 3], scope='conv2')
net = slim.max_pool2d(net, [2, 2], scope='pool2')
net = slim.repeat(net, 3, slim.conv2d, 256, [3, 3], scope='conv3')
net = slim.max_pool2d(net, [2, 2], scope='pool3')
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv4')
net = slim.max_pool2d(net, [2, 2], scope='pool4')
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv5')
net = slim.max_pool2d(net, [2, 2], scope='pool5')
# Use conv2d instead of fully_connected layers.
net = slim.conv2d(net, 4096, [7, 7], padding=fc_conv_padding, scope='fc6')
net = slim.dropout(net, dropout_keep_prob, is_training=is_training,
scope='dropout6')
net = slim.conv2d(net, 4096, [1, 1], scope='fc7')
# Convert end_points_collection into a end_point dict.
end_points = slim.utils.convert_collection_to_dict(end_points_collection)
if global_pool:
net = tf.reduce_mean(
input_tensor=net, axis=[1, 2], keepdims=True, name='global_pool')
end_points['global_pool'] = net
if num_classes:
net = slim.dropout(net, dropout_keep_prob, is_training=is_training,
scope='dropout7')
net = slim.conv2d(net, num_classes, [1, 1],
activation_fn=None,
normalizer_fn=None,
scope='fc8')
if spatial_squeeze:
net = tf.squeeze(net, [1, 2], name='fc8/squeezed')
end_points[sc.name + '/fc8'] = net
return net, end_points
vgg_16.default_image_size = 224
# Alias
vgg_d = vgg_16
|
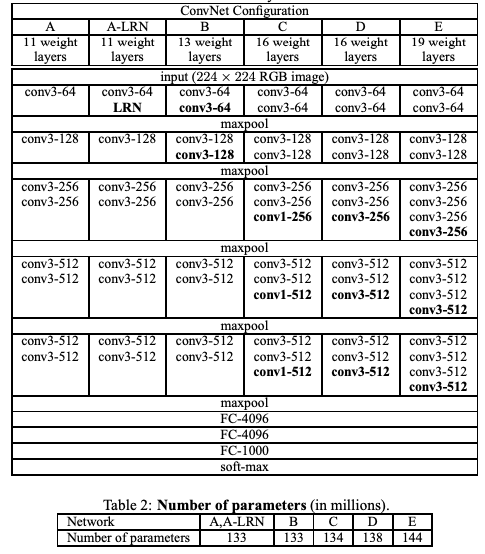 VGG Configurations: Different columns represent different depths
VGG Configurations: Different columns represent different depths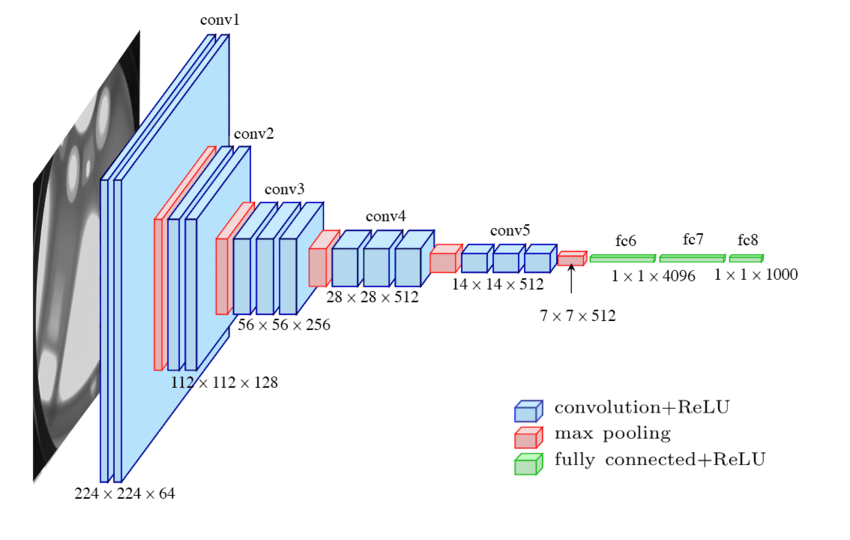 VGG16 Network
VGG16 Network