Engineering AI Agents
BOOK
Foundations
Training Deep Networks
Perception
Kinematics
State Estimation
Large Language Models
Multimodal Reasoning
Task Planning
Global Planning
Local Planning
Markov Decision Processes
Reinforcement Learning
VLA Agents
COURSES
Introduction to AI
AI for Robotics
Deep Learning for Computer Vision
DATA MINING - BEING PORTED
MEDIA
AI for Robotics
ABOUT ME
Bellman Equations
Applying the Bellman Optimality Backup
Bellman Equations
Markov Decision Processes
Introduction to MDP
Bellman Expectation Backup
Policy Evaluation (Prediction)
Bellman Optimality Backup
Applying the Bellman Optimality Backup
Policy Improvement (Control)
Dynamic Programming Algorithms
Policy Iteration
Policy Iteration Gridworld
Value Iteration
Value Iteration Gridworld
On this page
Problem statement
Solution
Edit this page
View source
Report an issue
Bellman Equations
Applying the Bellman Optimality Backup
Applying the Bellman Optimality Backup
Problem statement
Finite State Machine of a a recycling robot and MDP dynamics LUT
Solution
solution
Bellman Optimality Backup
Policy Improvement (Control)
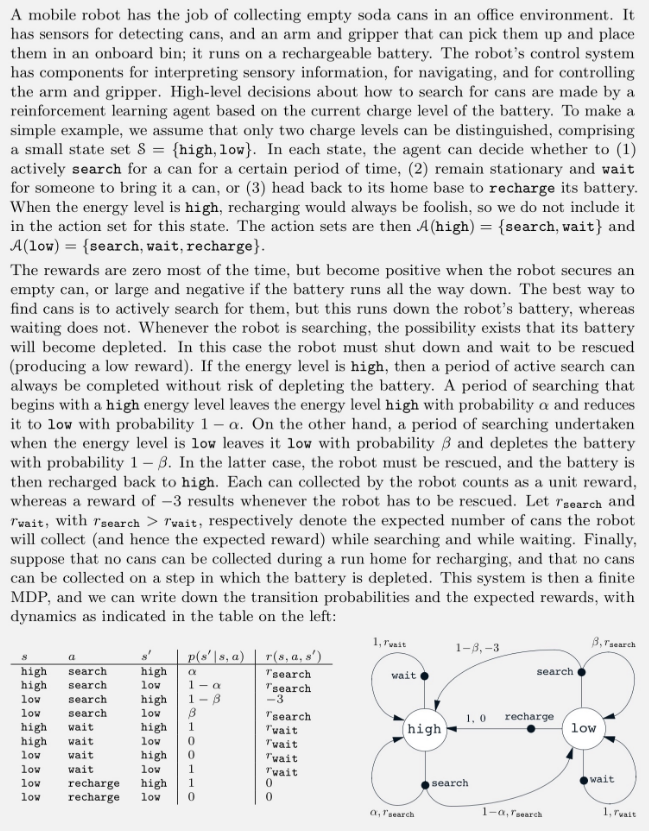 Finite State Machine of a a recycling robot and MDP dynamics LUT
Finite State Machine of a a recycling robot and MDP dynamics LUT Finite State Machine of a a recycling robot and MDP dynamics LUT
Finite State Machine of a a recycling robot and MDP dynamics LUT