Policy Iteration
In this section we start developing dynamic programming algorithms that solve a perfectly known MDP. In the Bellman expectation backup section we have derived the equations which allowed us to efficiently compute the value function. We have seen also that the Bellman optimality backup equations are non linear and need to be solved using iterative approaches - their solution will result in the optimal value function \(v_*\) and the optimal policy \(\pi_*\).
In policy iteration, given the policy \(\pi\), we oscillate between two distinct steps as shown below:
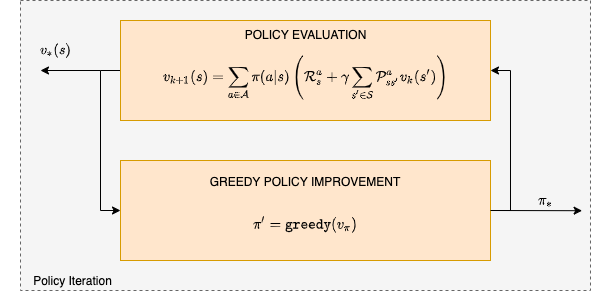
In the policy evaluation (also called the prediction) step we estimate the state value function \(v_\pi ~ \forall s \in \mathcal S\).
In the policy improvement (also called the control) step we apply the greedy heuristic and elect a new policy based on the evaluation of the previous step.
This is shown below and we defer discussion on convergence until we treat later the generalized policy iteration.
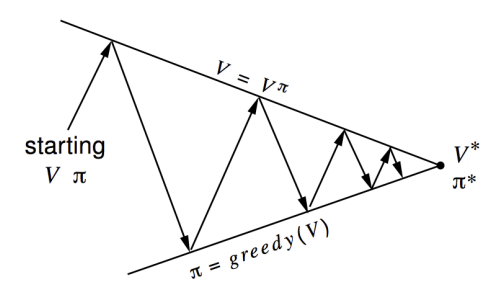
Policy and state value convergence to optimality in policy iteration. Up arrows are the evaluation steps while down arrows are the improvement steps. Although the real geometry is much more complicated than this, the diagram suggests what happens: Each process drives the value function or policy toward one of the lines representing a solution to one of the two goals. The goals interact because the two lines are not orthogonal. Driving directly toward one goal causes some movement away from the other goal. Inevitably,however, the joint process is brought closer to the overall goal of optimality.
It can be shown that the policy iteration will converge to the optimal value function \(v_*(s)\) and policy \(\pi_*\).
Gridworld policy iteration example
The grid world example shown below is characterized by:
- Not discounted episodic MDP (γ = 1)
- Non terminal states 1, …, 14
- One terminal state (shown twice as shaded squares)
- The action that the agent takes, cause the intended state transition with probability 1.0. Actions leading out of the grid leave state unchanged.
- Reward is −1 until the terminal state is reached
- Agent follows a uniform random policy \(\pi(north|.) = \pi(south|.) = \pi(east|.) = \pi(west | .) = 0.25\)
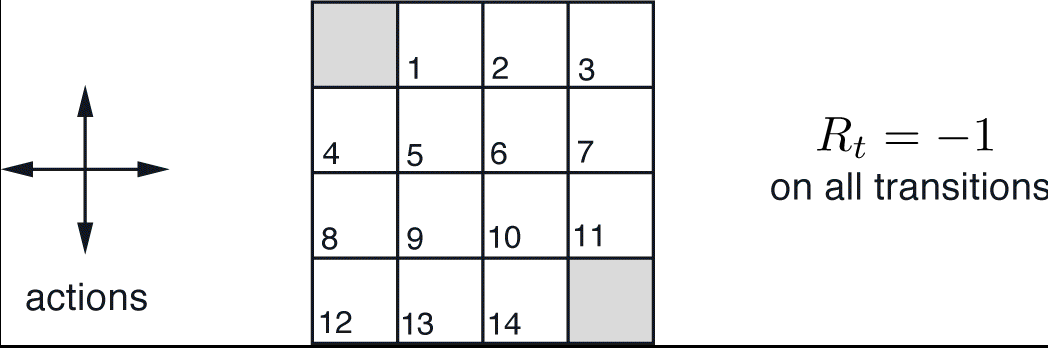
The terminal states are shaded. The reward is \(-1\) on all transitions until the terminal states are reached. The non-terminal states are \(S_1,S_2,...,s_{14}\).
We begin with random values (or 0.0) and a random policy \(\pi\)
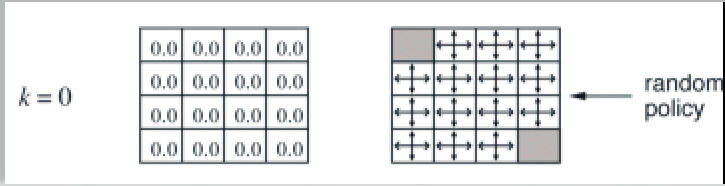
Initial values and policy for policy iteration
Policy Evaluation
- Find value function based on initial random policy:
\[v(s) = R(s) + \sum_{s^\prime} P(s^\prime| s,a)v(s^\prime)\]
\[v(s_{1}) = -1 + \frac{1}{4}v(s_{1}) + \frac{1}{4}v(s_{2}) + \frac{1}{4}v(s_{5}) = -1\] \[\ldots\] \[ v(s_{9}) = -1 + \frac{1}{4}v(s_{8}) + \frac{1}{4}v(s_{5}) + \frac{1}{4}v(s_{13}) + \frac{1}{4}v(s_{10}) = -1\] \[ \ldots \]
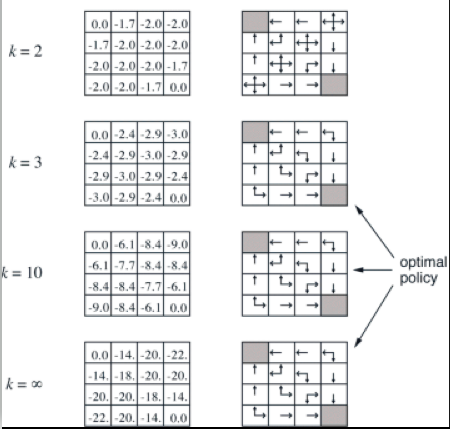
- The result is as shown below:
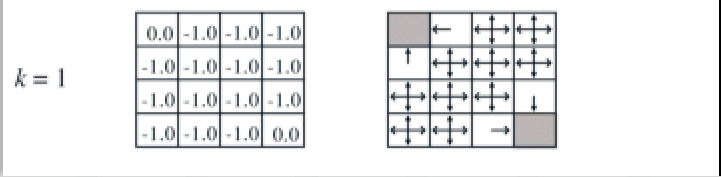
Policy Improvement
- Next we compute the policy:
\[ \pi(s_{4}) = \underset{a}{max}[\frac{1}{4}v(s_{term})| \uparrow, \frac{1}{4}v(S_5)| \rightarrow, \frac{1}{4}v(S_4)| \leftarrow, \frac{1}{4}v(S_8), \downarrow] = \uparrow \]
\[\pi(s_{6}) = \underset{a}{max}[\frac{1}{4}v(S_2)| \uparrow, \frac{1}{4}v(S_7)| \rightarrow, \frac{1}{4}v(S_5)| \leftarrow, \frac{1}{4}v(s_{10}), \downarrow ] = \mathtt{random\ policy} \]
The result is shown below for \(k=2\) and similarly for other iterations.