Manufacrturing Robot Planning in PDDL
This is a real case that we tackled for a manufacturing company. This company devises supply chains to make pieces of medical equipments. A supply chain consists of independent robotized units/cells, which realize specific operations on the pieces: cleaning, checking, marking, assembling etc. The pieces are put on trays, and mobile robots are programmed to take and to transport the trays between the different units. The image below illustrates this process:
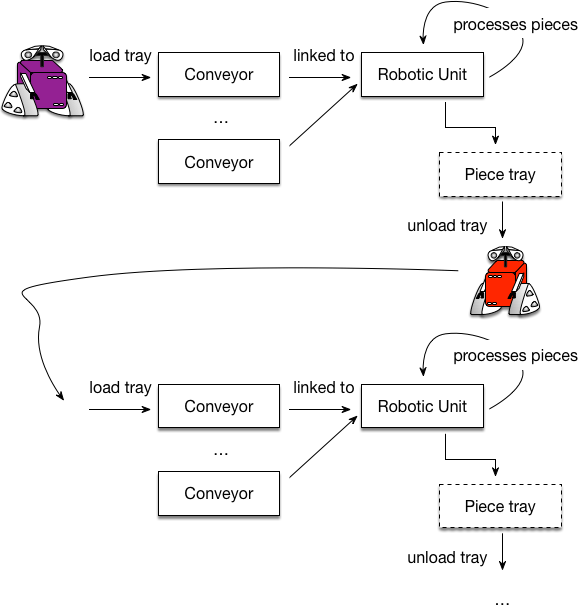
There are different symbolType of pieces at the beginning of the supply chain. A tray contains only one symbolType of pieces, and, each piece undergoes a sequence of operations from the beginning to the end of the supply chain. At the beginning of the supply chain, a unit is used to store all the trays. The units can have several inputs named "conveyors". The conveyors and the units are specific to a set of pieces: pieces are admissible to identified conveyors and units. Initially, every processing (unit loading/unloading, robot movements etc.) was hard-coded in a database by human operators. Automated planning is now used to optimize unit/robot scheduling and to increase production efficiency.
Defining the Domain
Requirements
Let start by creating the domain file. For instance, rsc-domain.pddl write the following PDDL to give a name to this domain and specify the requirements of the domain.
(define (domain robotic-manufactoring)
(:requirements :strips :typing)Types
Then, define the set of objects (types) that will be used in this domain. Quite obviously, we will have the types robot (mobile robots), conveyor, unit, piece, etc.
(:types
robot - agent
conveyor unit - location
piece operation tray - object
)Constants
We also declare a dummy operation called stop as a constant of the domain which will be used in one action:
(:constants
stop - operation
)Predicates
Now it is time to think to a model for the domain. It is based on the following ideas: * Producer/consumer: the trays are resources consumed by the conveyors and produced by the units. A "one-to-many" relation is created between each unit and the conveyors. A tuple conveyors/unit is like a (Petri Net) "machine" that consumes and produces trays. The conveyors are the inputs and the unit is the output. Each input/output's capacity is one, * Operation stacks: each tray is associated to a stack of operations that have to be performed on the pieces of the tray. The last operation of the stack is always _stop. Each time a machine consumes a tray, the associated stack is pulled, * Goal: to empty all the stacks by connecting the machines with robots transporting trays from units (outputs) to conveyors (inputs). The capacity of the robots is one.
Here is the vocabulary ("predicates") that will be used by the actions:
(:predicates
;;robot
(robot_available ?robot - robot)
;; is the robot available? capacity is one
(robot_at ?robot - robot ?l - location)
;; location of a robot. Either a conveyor or a unit
;;conveyor
(conveyor_accepted_piece ?piece - piece ?conv - conveyor)
;; constraint on admissible pieces
(conveyor_available ?conv - conveyor)
;; is the conveyor available? capacity is one
(conveyor_unit ?conv - conveyor ?unit - unit)
;; "one-to-many" relation between units and conveyors
;;unit
(unit_accepted_piece ?piece - piece ?unit - unit)
;; constraint on admissible pieces
(unit_available ?unit - unit)
;; is the unit available? unit capacity is one
(unit_operation ?op - operation ?unit - unit)
;; operation provided by the unit
;;tray
(tray_on_unit ?tray - tray ?unit - unit)
;; the tray is in the unit
(tray_on_conv ?tray - tray ?conv - conveyor)
;; the tray is input into the conveyor
(tray_on_robot ?tray - tray ?robot - robot)
;; the robot is at the tray
(tray_completed ?tray - tray)
;; all the scheduled operations are completed
;;piece
(piece_on ?piece - piece ?tray - tray)
;; "one-to-one" relation: trays contain only one type of pieces
;;stack of operations
(start ?op - operation ?tray - tray)
;; ?op is on top of the stack.
;; The stack has a one-to-one relation with the tray (same id)
(todo ?opontop - operation ?nextop - operation ?tray - tray)
;; linked list of operations: ?nextop follows ?opontop. Last operation is stop
)For instance, in the problem file, you can now specify an initial state beginning by:
(start op10 tray32)
(todo op10 op20 tray32)
(todo op20 op30 tray32)
(todo op30 stop tray32)This means that the sequence op10, op20, op30 of operations is scheduled on tray32.
Likewise,
(conveyor_unit conv1 unit1)
(conveyor_unit conv2 unit1)means that unit1 has two inputs conv1 and conv2.
Operators
The new step is to define all the actions. For this domain, we will need 6 actions:
(:action pickup_tray_on_unit
:parameters (?robot - robot ?unit - unit ?tray - tray)
:precondition (and (robot_available ?robot)
(robot_at ?robot ?unit)
(tray_on_unit ?tray ?unit)
)
:effect (and (not (tray_on_unit ?tray ?unit))
(not (robot_available ?robot))
(tray_on_robot ?tray ?robot)
(unit_available ?unit)
)
)Action pickup_tray_on_unit allows a robot to pickup a tray on a unit provided the robot is available and located at this unit. The effects are that the tray is no more on the unit, the tray is on the robot and the robot is not available to pickup another tray. The unit becomes available to process another tray.
(:action drop_tray_on_conveyor
:parameters (?robot - robot ?conv - conveyor ?tray - tray ?piece - piece)
:precondition (and (conveyor_available ?conv)
(robot_at ?robot ?conv)
(tray_on_robot ?tray ?robot)
(conveyor_accepted_piece ?piece ?conv)
(piece_on ?piece ?tray)
)
:effect (and (not (conveyor_available ?conv))
(not (tray_on_robot ?tray ?robot))
(tray_on_conv ?tray ?conv)
(robot_available ?robot))
)Action drop_tray_on_conveyor is the counterpart of pickup_tray_on_unit. It allows a robot to put a tray on a conveyor. The preconditions are that the robot and the conveyor are in the same place, the conveyor is available and it accepts the same type of pieces than the tray. The effects are that the conveyor is no more available, the tray is no more on the robot (it is on the conveyor) and the robot is now available.
(:action robot_move
:parameters (?robot - robot ?from - location ?to - location)
:precondition (and (robot_at ?robot ?from))
:effect (and (robot_at ?robot ?to)
(not (robot_at ?robot ?from))
)
)Action robot_move is trivial: it moves a robot from location ?from$ to location $?to. Locations are either a conveyor or a unit (see :types keyword).
(:action conveyor_load_tray_in_unit
:parameters (?conv - conveyor ?unit - unit ?tray - tray ?piece - piece)
:precondition (and (unit_available ?unit)
(conveyor_unit ?conv ?unit)
(unit_accepted_piece ?piece ?unit)
(piece_on ?piece ?tray)
(tray_on_conv ?tray ?conv)
)
:effect (and (not (tray_on_conv ?tray ?conv))
(not (unit_available ?unit))
(tray_on_unit ?tray ?unit))
)Action conveyor_load_tray_in_unit consumes a tray that is loaded on a conveyor linked to a unit provided the pieces of the tray are accepted by this unit. As a consequence, the tray is no more one the conveyor, the unit is not available and the tray is on the unit, ready for processing.
(:action unit_execute_operation
:parameters (?unit - unit ?top - operation ?next - operation ?tray - tray)
:precondition (and (unit_operation ?top ?unit)
(tray_on_unit ?tray ?unit)
(start ?top ?tray)
(todo ?top ?next ?tray)
)
:effect (and (start ?next ?tray)
(not (todo ?top ?next ?tray))
(not (start ?top ?tray))
)
)Action unit_execute_operation applies the operation pending on top of the tray's stack. The preconditions are that the unit is able to perform this operation, the tray is in the unit and this operation operation is on top of the stack. The effects are that the operation is pulled from the stack and the next operation becomes the top of the stack.
(:action tray_completed
:parameters (?op - operation ?tray - tray ?unit - unit)
:precondition (and (start stop ?tray)
(tray_on_unit ?tray ?unit)
)
:effect (and (tray_completed ?tray)
(unit_available ?unit)
(not (tray_on_unit ?tray ?unit)))
)Action tray_completed is a dummy action which purpose is to check that all the scheduled operations on a tray have been done (stop operation on top of the tray's stack). It is used to build a goal state and to terminate the planning procedure for a given tray. Here we suppose that an operator picks up the tray once all the operations have been done and the unit becomes available to process another tray.
Defining the problem
Let start by creating the problem file, e.g., rsc_problem_easy.pddl. The problem we wish to define is a simple problem with one type of pieces, a single tray, robot and conveyor; two units, a stocker storing this tray at the initial state and a processing unit. The goal is for the unit to perform three operations (op10 > op20 > op30) on the tray.
Objects
Hence, the types and objects are as follows:
(:objects
unit1 stocker - unit
conv1 - conveyor
robot1 - robot
tray1 - tray
piece1 - piece
op10 op20 op30 - operation
)Initial State
This snippet of code is the initial state:
(:init
;; Operation schedule
(start op10 tray1)
(todo op10 op20 tray1)
(todo op20 op30 tray1)
(todo op30 stop tray1)
;; Initiate pieces on tray
(piece_on piece1 tray1)
;; At the beginning, tray1 is on the stocker
(tray_on_unit tray1 stocker)
;; Initiate robot
(robot_at robot1 stocker)
(robot_available robot1)
;; Initiate conveyor
(conveyor_unit conv1 unit1)
;; Setup unit
(unit_accepted_piece piece1 unit1)
(unit_accepted_piece piece1 stocker)
(unit_operation op10 unit1)
(unit_operation op20 unit1)
(unit_operation op30 unit1)
;; Unit1 is ready
(unit_available unit1)
;; Setup conveyor
(conveyor_accepted_piece piece1 conv1)
(conveyor_available conv1)
;; Setup robot
(robot_available robot1)
)Goal Description
The goal is simply the completion of tray1:
(:goal
(and (tray_completed tray1))
)