Engineering AI Agents
BOOK
Foundations
Training Deep Networks
Perception
Kinematics
State Estimation
Large Language Models
Multimodal Reasoning
Task Planning
Global Planning
Local Planning
Markov Decision Processes
Reinforcement Learning
VLA Agents
COURSES
Introduction to AI
AI for Robotics
Deep Learning for Computer Vision
DATA MINING - BEING PORTED
MEDIA
AI for Robotics
ABOUT ME
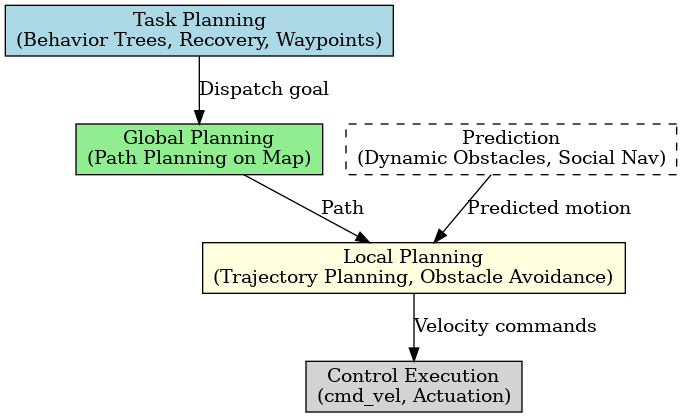
Planning
Figure 1: Planning - components for navigation.