One year with Udacity's self-driving car engineering program
- Pantelis Monogioudis
- Head of Applied ML Research Group, Augmented Intelligence & Devices Research Lab
- Bell-Labs, Murray Hill, NJ, USA

About me
20 years of experience in leading Research & Development projects in multiple countries / cultures. I started in wireless communications (PHY/MAC) in the 90s and in 2000’s started diversifying into Machine Learning initially for wireless networks and later for all sorts of applications. Currently leading ~15 researchers in Murray Hill NJ and Budapest in Applied Machine Learning working on real-time multisensory data fusion applications. 1 (failed) startup, 15 journal publications and 50 patents issued/pending. As of spring 2019 I am also with the Computer Science department of NJIT. For the last 20 years I live in Randolph, NJ with my wife Dora, my two boys Alex & Nicholas (and as of recently my dog Bleu).
We are hiring ML researchers / engineers in Paris-Saclay region - please get in touch with me via linkedin / twitter if you are interested.
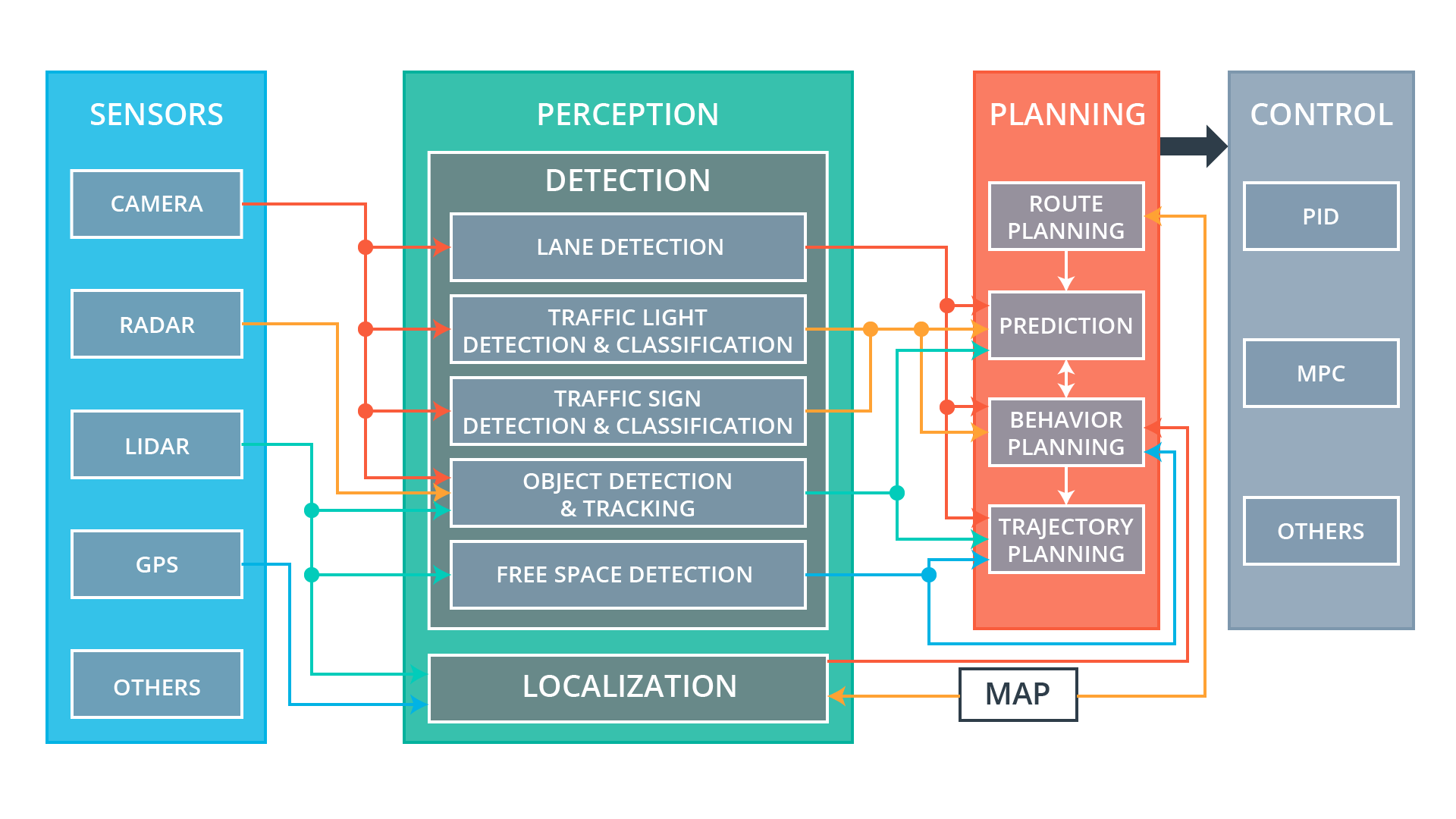
Architecture
Self-driving car subsystems
Carla is based on the Robotic Operating System (ROS)
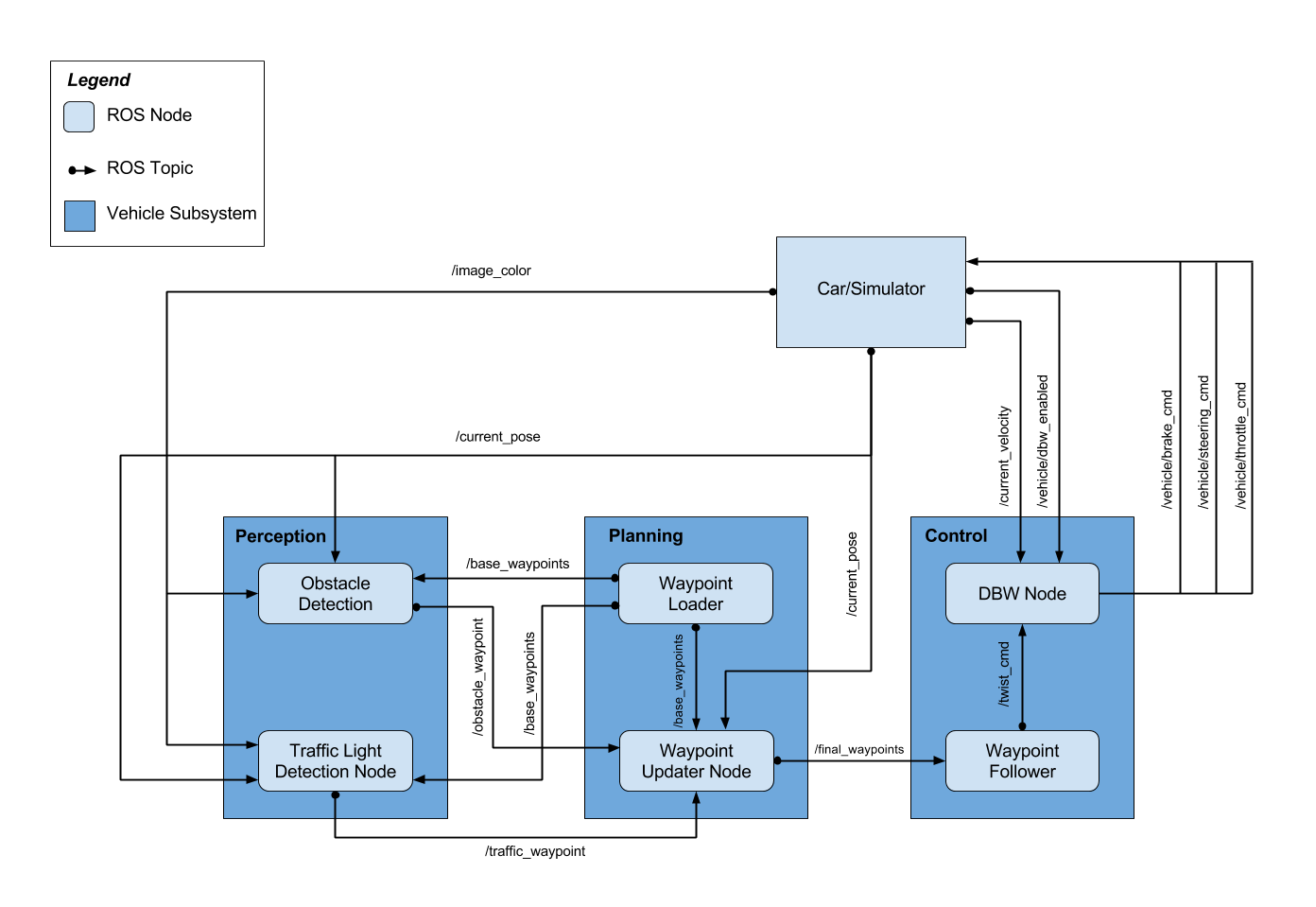
ROS Connected Simulator for System Integration
The car is not enough - you need also a real world simulator with a good physics engine and develop the ability to communicate with ROS.
The final test - somewhere in California (March 2018)
Perception Subsystem - Vision
Lane line detection
Traffic sign classification - images in the dataset (32,32,3)
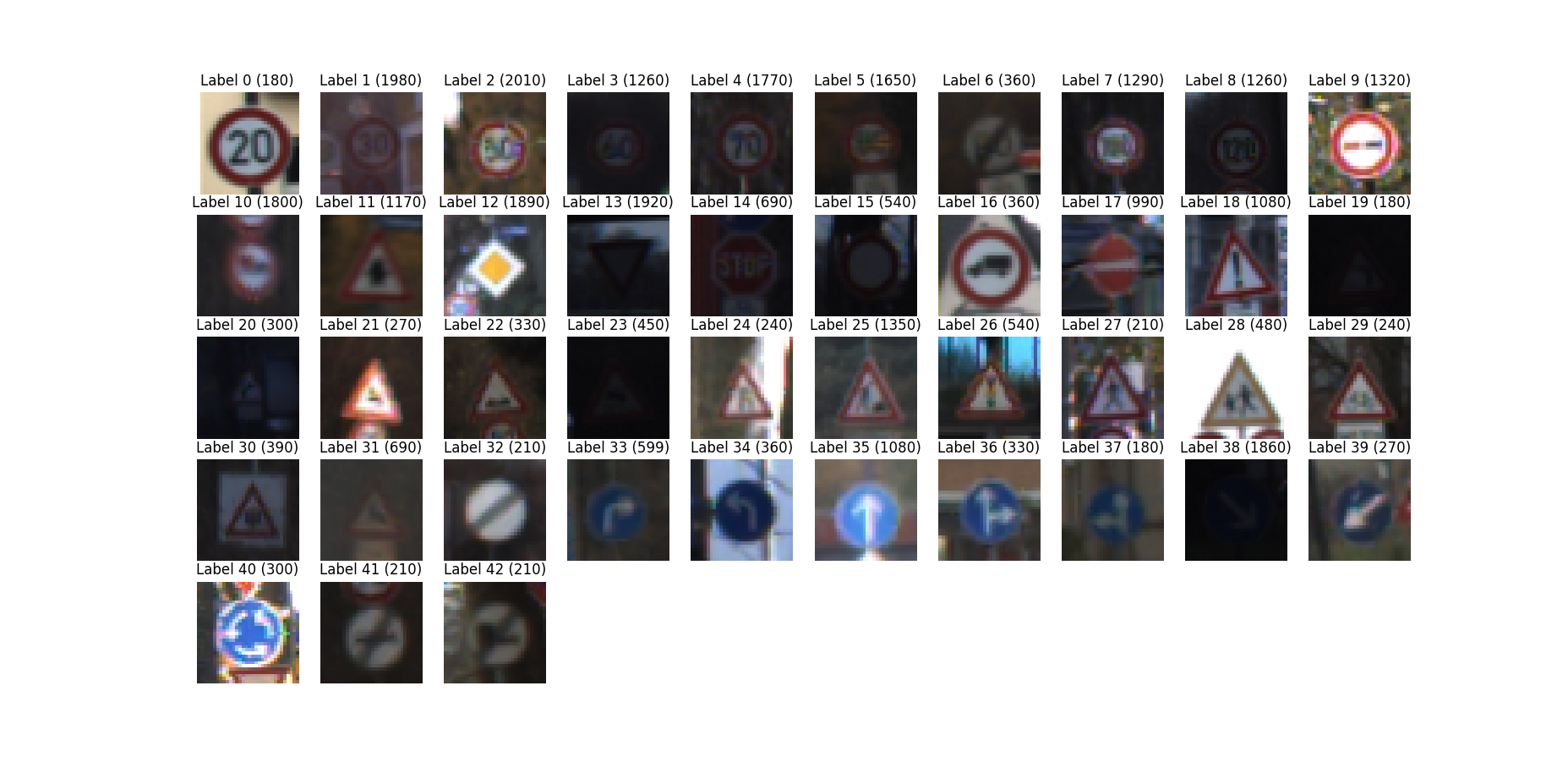
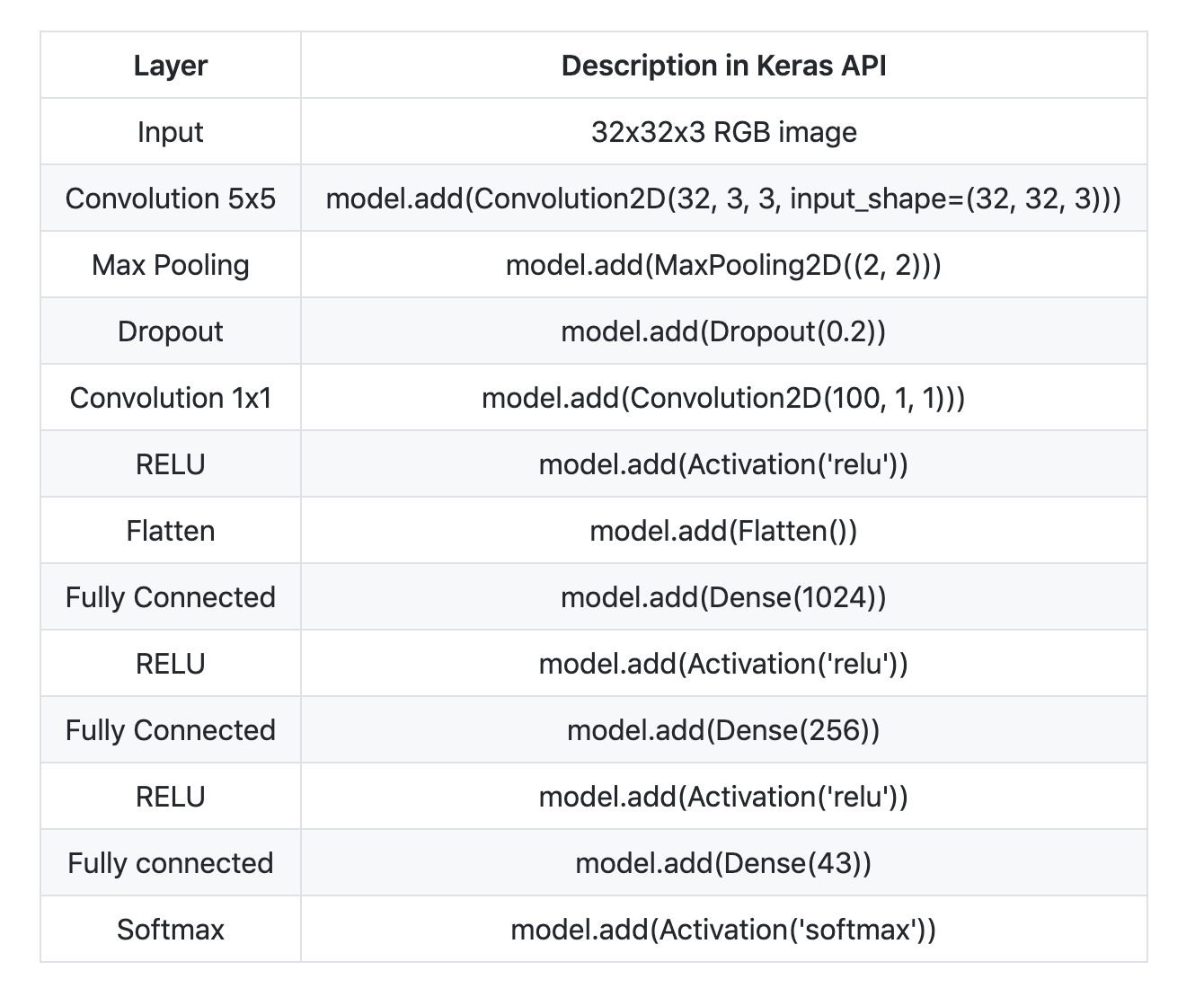
Traffic sign classification
- For German traffic signs classification, the Keras API was used to define a deep neural network and train its hyperparameters.
- Validation set accuracy with the CNN bellow was 94.830%
Scene Understanding
Semantic Segmentation
- Click https://github.com/pantelis/CarND-Semantic-Segmentation-Project
- The Kitti Road dataset from here was used for training and testing.
- We label the pixels of a road in images using a Fully Convolutional Network (FCN) based on VGG16
Localization & Sensor Fusion
LIDAR
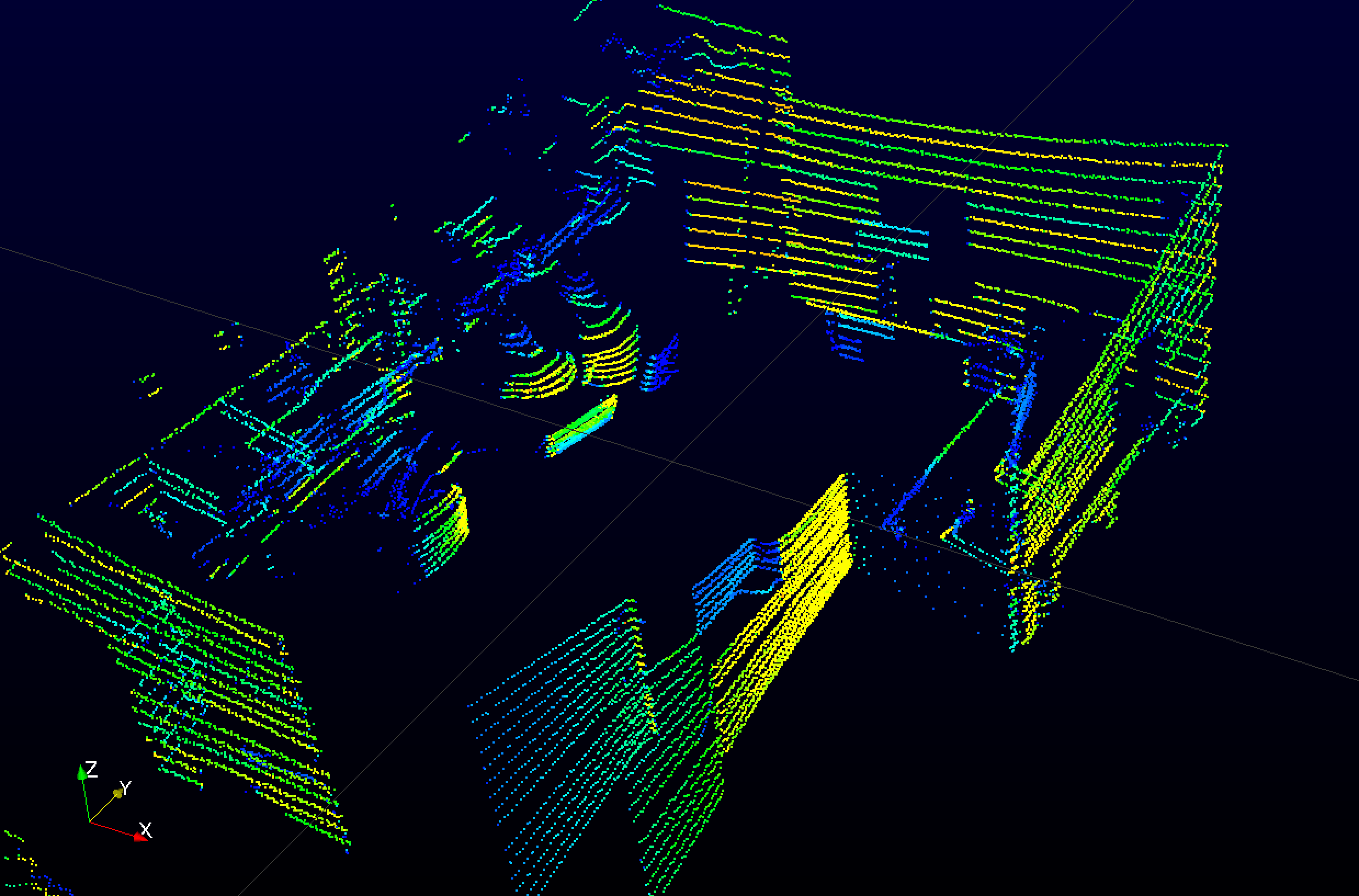
- Velodyne VLP-16 - indoor scanning .
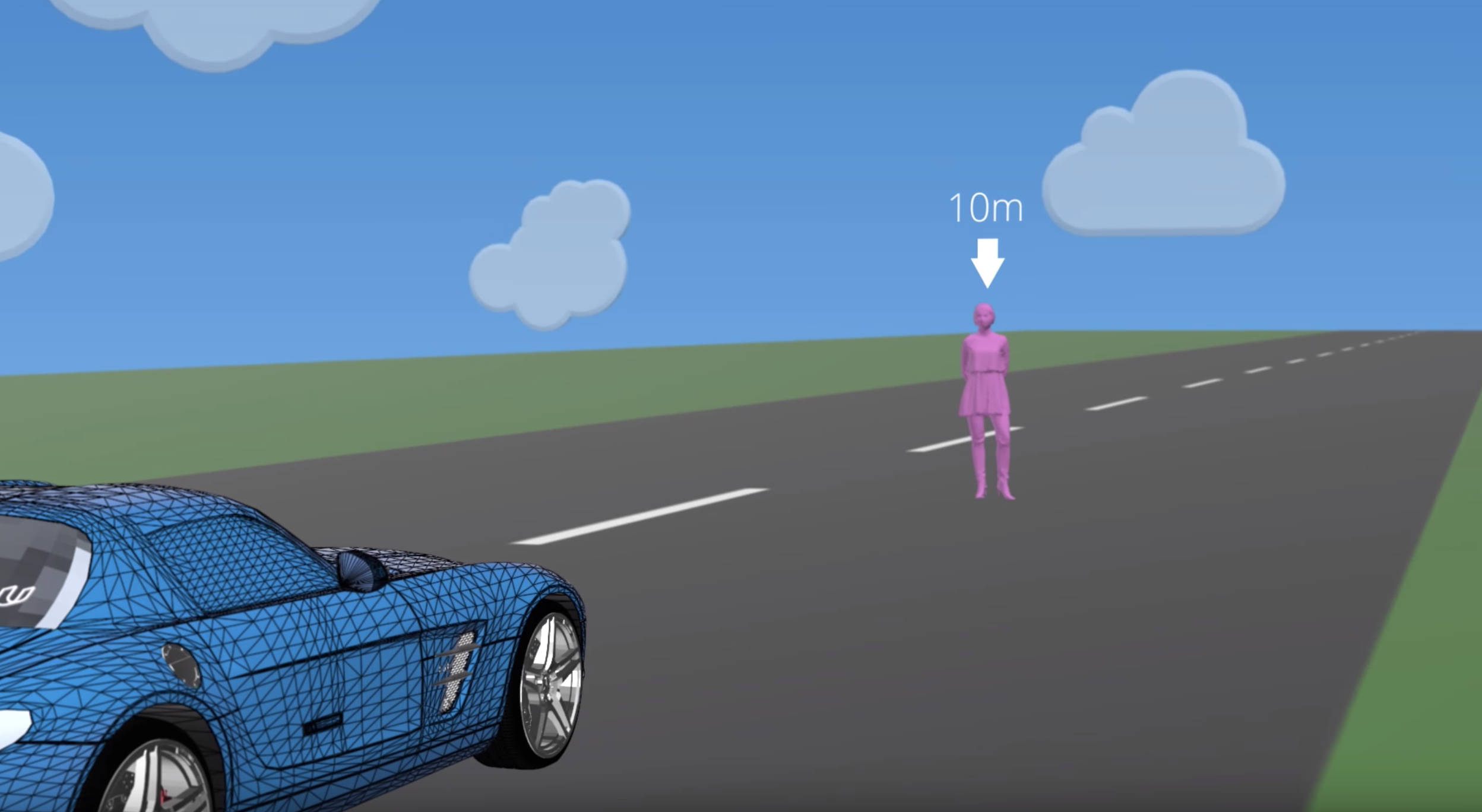
Localization Problem Statement

- Localization accuracy must be 3cm-10cm.
- To localize the car, you need to match the (distance) measurements using the onboard sensors (lidar/radar) to those of the map.
- This is one of the reasons why good map info is important.
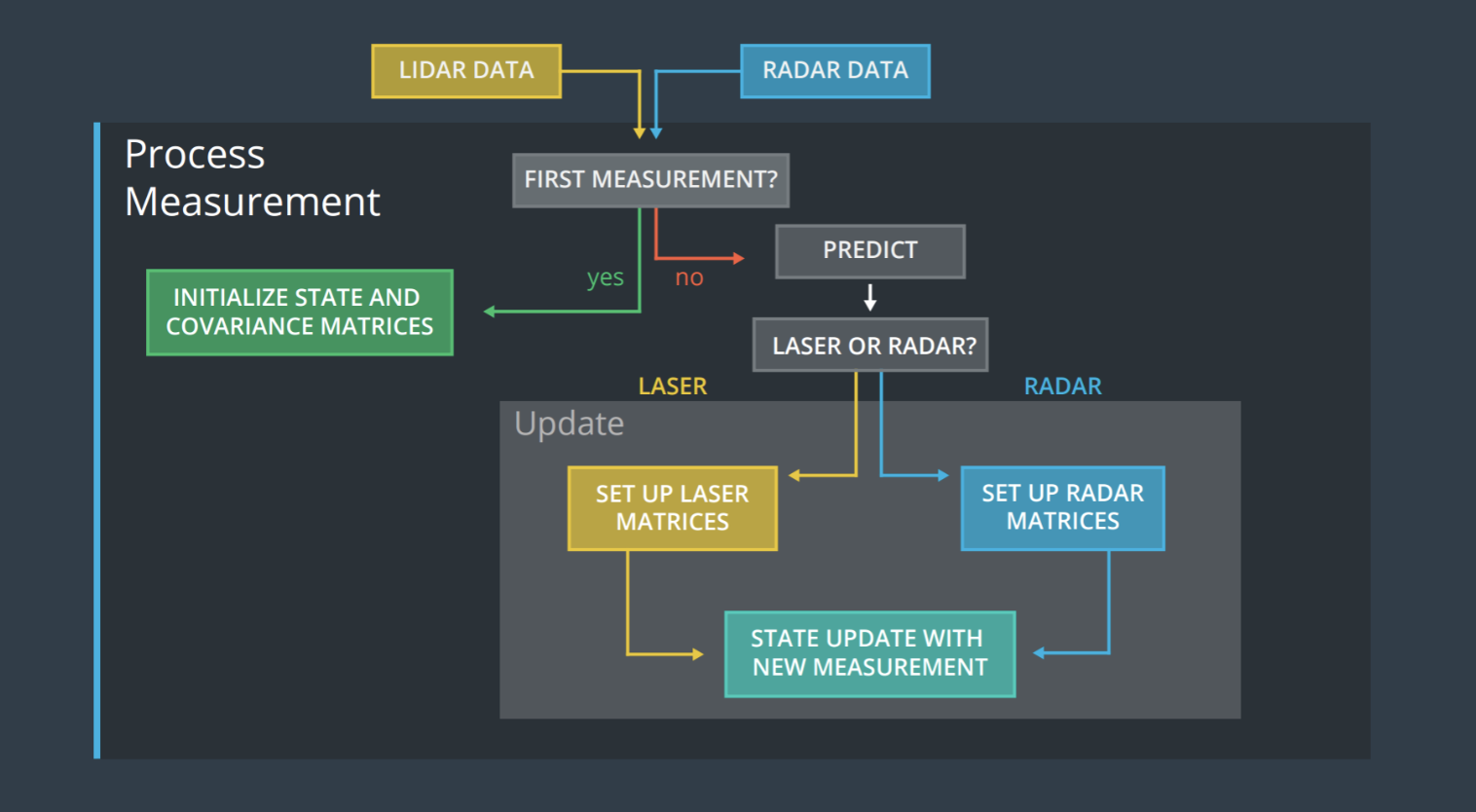
LIDAR-RADAR Fusion
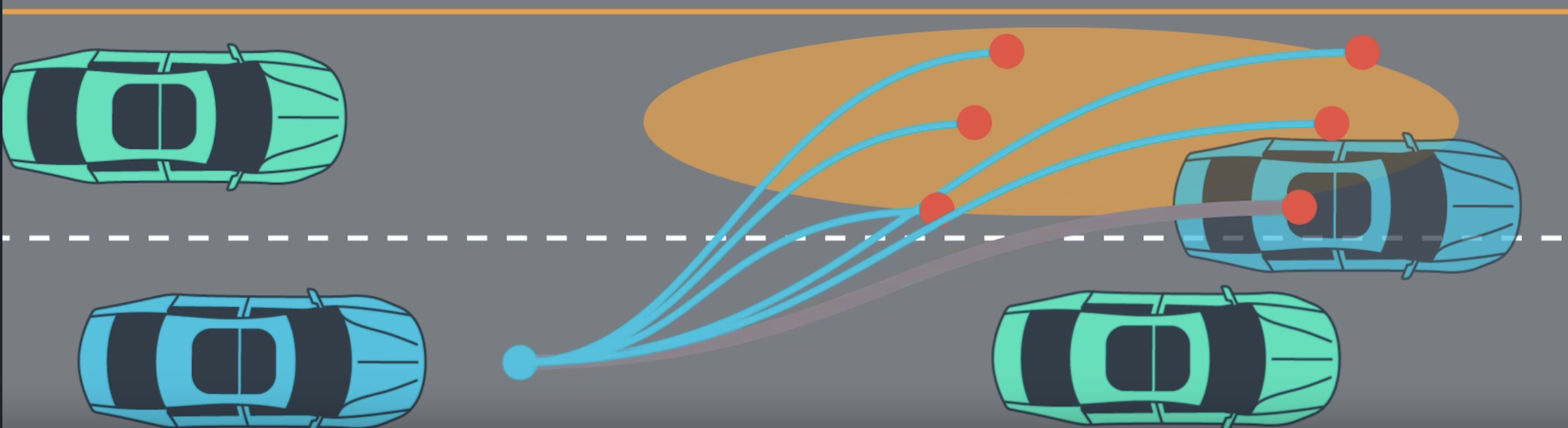
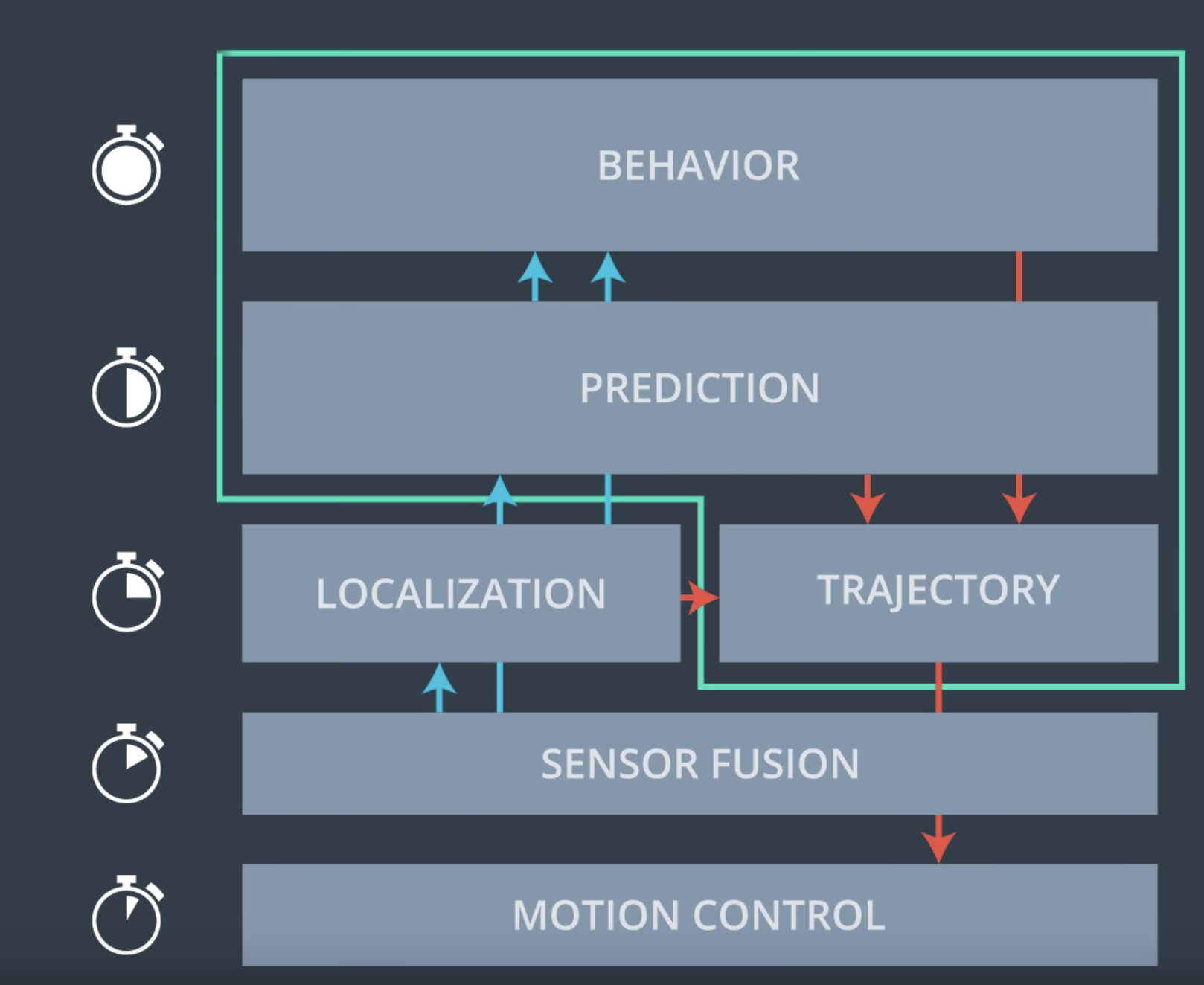
Planning
Planning Subsystem Overview
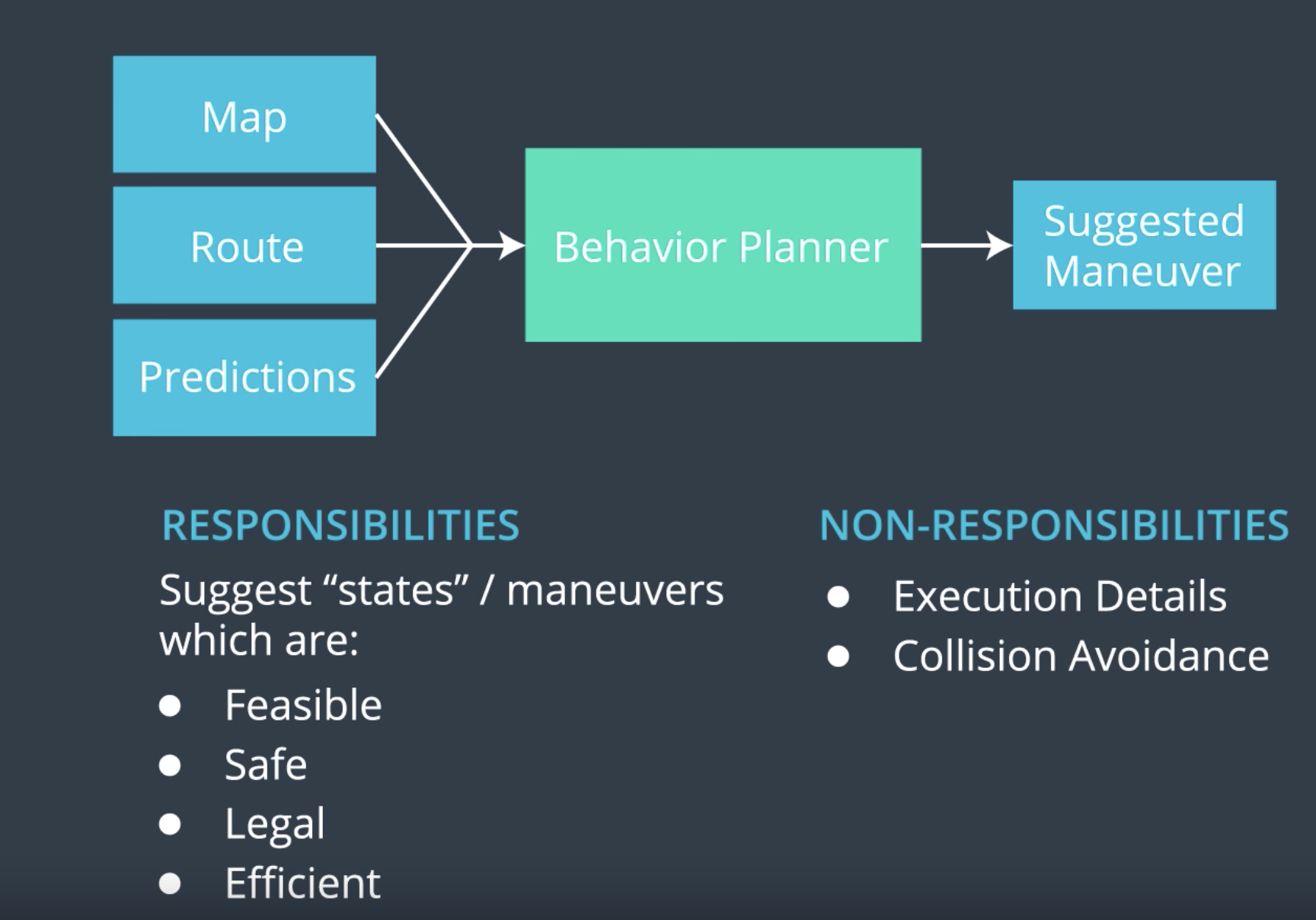
Behavioral Planning
Trajectory Generation